XiaoMi-AI文件搜索系统
World File Search System试飞

愚蠢而不负责任?来自...... - Diva Portal
从 Jim March 那里我们了解到,组织智能要求适应遥远未来的需求以及有效利用当前的资源。对偏离常规的新想法的承诺对于长期适应是必要的,但成功何时或如何实现存在很大的不确定性。本文通过对军用飞机制造商萨博的历史研究,探索从在开发相当简单的飞机系统时使用物理模型和危险的试飞进行实验,到使用可以在模拟世界中测试的虚拟模型开发复杂的集成飞机系统的转变,从而推迟选择和在物理世界中投入资源的需要。我们展示了如何在五代飞机中开发建模技术和工具,以帮助开发人员在日益逼真的虚拟现实中表示和评估替代想法,从而减少飞机开发中的物质和致命后果。我们区分了混合形式的评估和似乎朝着“虚拟在线评估”方向发展的转变,其中基于真实飞行数据的经验模拟模型减少了现实与表述之间的保真度差距。根据 Jim March 的精选文章,我们推测这种转变对于从经验中学习以及不承担后果的愚蠢行为的可能性意味着什么。
事故最终调查报告提交国家
Saras 原型 PT2 飞机 VT-XRM 由班加罗尔国家航空航天实验室制造和拥有,计划进行第 49 次试飞。2009 年 6 月 3 日,还包括在 10000’AMSL 处进行飞行中发动机关闭和重新点火程序。首席试飞员坐在指挥官座位上,试飞员坐在副驾驶座位上,飞行测试工程师也在机上。飞机于 0925 UTC 起飞,随后切换到雷达。没有发生任何事件。飞机随后被允许升至 100 级飞行高度,飞行距离可达 10 英里。在 9000’AMSL 完成一般操作检查后,没有任何事件发生,在 r/w 09 上进行了单引擎模拟进近。大约 0941 UTC 时,飞机获准超调,风速 090/06 节。飞机在 300’AGL 超调。飞机随后再次切换到雷达。0942 UTC 时,飞机获准爬升 FL100 并继续前往西南 2 区执行发动机重新点火测试程序。在爬升至该区约 9000’AMSL 后,西南航空飞机在 0948 UTC 时报告了 15 英里和 FL 90

愚蠢而不负责任?从物理到虚拟...
从 Jim March 那里我们了解到,组织智能要求适应遥远未来的需求以及有效利用当前的资源。对偏离常规的新想法的承诺对于长期适应是必要的,但成功何时或如何实现存在很大的不确定性。本文通过对军用飞机制造商萨博的历史研究,探索从在开发相当简单的飞机系统时使用物理模型和危险的试飞进行实验,到使用可以在模拟世界中测试的虚拟模型开发复杂的集成飞机系统的转变,从而推迟选择和在物理世界中投入资源的需要。我们展示了如何在五代飞机中开发建模技术和工具,以帮助开发人员在日益逼真的虚拟现实中表示和评估替代想法,从而减少飞机开发中的物质和致命后果。我们区分了混合形式的评估和似乎朝着“虚拟在线评估”方向发展的转变,其中基于真实飞行数据的经验模拟模型减少了现实与表述之间的保真度差距。根据 Jim March 的精选文章,我们推测这种转变对于从经验中学习以及无所顾忌的愚蠢行为的可能性意味着什么。

三十年代 - 海军历史和遗产司令部
拥有一支可观的海上航空兵。海军航空兵获得了更广泛的尊重,随着它在舰队组织和作战中取得突出地位,成为真正综合的海军力量。只有在轻于空气的飞艇领域才遭遇严重挫折。阿克伦号 (ZRS-4) 和梅肯号 (ZRS-5) 坠毁,敲响了海军硬式飞艇计划的丧钟;尽管调查委员会给出了正面报告,在德国取得了持续成功,并一再推荐其在专业作战中的价值;硬式飞艇还是完蛋了。与之相关,非硬式飞艇几乎也随之消亡。随着十年的结束,在整个时期内回荡在两大洋的有限战争的不祥轰鸣声越来越大。海军扩编获得批准;飞行员培训计划得到加强。第二次世界大战中创造历史的舰船被设计并下水。大胆推进太平洋时,在甲板上起降的飞机已在设计中;有些飞机已开始试飞。随着欧洲战争的全面爆发和美国宣布中立;海军在航空兵的大力支持下,在大西洋沿岸执行巡逻任务,其行动与后来同一部队在战争条件下执行的任务出奇地相似。
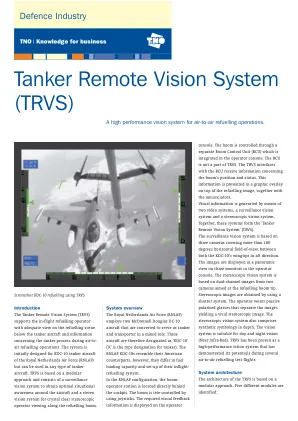
油罐车远程视觉系统
控制台。吊杆通过集成在操作员控制台中的单独吊杆控制单元 (BCU) 进行控制。BCU 不是 TRVS 的一部分。TRVS 与 BCU 接口接收有关吊杆位置和状态的信息。此信息与信号器一起显示在加油图像顶部的图形叠加层中。视觉信息通过两个视频系统、一个监视视觉系统和一个立体视觉系统生成。这些系统共同构成了“加油机远程视觉系统”(TRVS)。监视视觉系统基于三个摄像头,覆盖超过 180 度的水平视野,位于 KDC-10 的两个翼尖之间,在后方。图像以全景视图显示在操作员控制台的三个监视器上。立体视觉系统基于两个瞄准加油杆尖端的摄像机的双通道图像。立体图像是通过使用快门系统获得的。操作员佩戴被动偏光眼镜,将图像分开,从而产生生动的立体图像。立体视觉系统还包括深度合成符号。该视觉系统适用于白天和夜间视觉(近红外)。TRVS 已被证明是一种高性能视觉系统,已在多次空对空加油试飞中展示了其潜力

实习飞行软件、计算机视觉和人工智能 瑞士苏黎世 公司:Daedalean 是一家总部位于苏黎世的初创公司,由前谷歌和 SpaceX 工程师创立,他们希望在未来十年内彻底改变城市航空旅行。我们结合计算机视觉、深度学习和机器人技术,为飞机开发最高级别的自主性(5 级),特别是您可能在媒体上看到的电动垂直起降飞机。如果您加入我们的实习,您将有机会与经验丰富的工程师一起工作,他们来自 CERN、NVIDIA、伦敦帝国理工学院或……自治系统实验室本身。您将构建塑造我们未来的尖端技术。最重要的是,我们还提供在瑞士阿尔卑斯山试飞期间与我们的飞行员一起飞行的机会。项目:不同的团队都提供机会。我们希望更多地了解您,以及我们如何让您的实习成为双方宝贵的经历。告诉我们您一直在做什么,以及您想在我们的团队中从事什么工作。它与深度学习有关吗?状态估计?运动规划?计算机视觉?或者其他什么?向我们展示您的热情所在。如果我们可以在您想要从事的领域提供指导和有趣的机会,我们将一起敲定细节。资格:强大的动手 C++ 经过验证的解决问题的能力如何申请:将您的简历/履历发送至 careers@daedalean.ai 。电话
实习飞行软件、计算机视觉和人工智能瑞士苏黎世公司:Daedalean 是一家总部位于苏黎世的初创公司,由前谷歌和 SpaceX 工程师创立,他们希望在未来十年内彻底改变城市航空旅行。我们结合计算机视觉、深度学习和机器人技术,为飞机开发最高级别的自主性(5 级),特别是您可能在媒体上看到的电动垂直起降飞机。如果您加入我们的实习,您将有机会与经验丰富的工程师一起工作,他们来自 CERN、NVIDIA、伦敦帝国理工学院或……自治系统实验室本身。您将构建塑造我们未来的尖端技术。最重要的是,我们还提供在瑞士阿尔卑斯山试飞期间加入我们飞行员的机会。项目:不同团队提供机会。我们想更多地了解您,以及如何让您的实习成为双方宝贵的经历。告诉我们你一直在做什么,以及你想在我们的团队中从事什么工作。它与深度学习有关吗?状态估计?运动规划?计算机视觉?或者别的什么?向我们展示你的热情所在。如果我们可以在你想从事的领域提供指导和有趣的机会,我们将一起敲定细节。资格: 强大的动手 C++ 证明解决问题的能力 如何申请: 将您的简历/履历发送至 careers@daedalean.ai 。请告诉我们一些关于您自己的信息,为什么您认为自己适合我们以及为什么我们适合您。

NESC 总工程师
“今年对我们国家和世界来说都是艰难的一年,在很多层面上都是如此。尽管面临许多挑战,但我很自豪能成为这个树立了积极榜样并激励全球社会的机构的一员。克服困难,NASA 在开发阿尔忒弥斯计划首次任务的系统方面取得了进展——成功完成了猎户座飞船的系统测试,包括结构测试件和空间环境测试,以验证飞船是否已为阿尔忒弥斯一号做好准备。该机构还完成了“像飞行一样测试”SLS 核心阶段绿色运行测试的先决条件系统测试案例,这是为阿尔忒弥斯一号核心阶段扫清障碍的最后一次热火测试。我们已经选定合作伙伴与我们一起开发载人着陆系统;我们与商业伙伴合作进行试飞,并自 2011 年以来首次成功将美国人从美国本土送往国际空间站;我们还将毅力号探测器发射到火星,并于 2 月着陆。通过所有这些,NESC 为 NASA 的许多成就提供了关键支持。通过专业知识和指导、严谨的技术卓越性以及降低宇航员风险的决心,NESC 一直致力于提供关键的独立技术评估以支持 NASA 计划。”

美国宇航局对远程医疗贡献简史
美国宇航局远程医疗的根源与该机构的早期历史和人类航天的现代历史密不可分。1961 年 4 月尤里·加加林成功完成太空飞行之前,医学界最主要的问题是人体是否能在太空中正常运作。特别是,医生们担心失重会阻碍血液循环、呼吸和消化。1 为了确定这是否真的是一个问题,美国和苏联的航天局都进行了多次试飞,使用连接到医疗监测系统的动物,通过遥测链路将动物的生物特征数据发送给地球上的科学家。即使在确定太空飞行对循环和呼吸健康几乎没有风险之后,美国宇航局仍然试图了解太空飞行是否会对人体产生任何其他生理或心理影响。2 对人体可能存在的局限性的关注迫使该机构采取以技术为中心的远程医疗方法。正如时任太空医学理事会医学研究主任的谢尔曼·维诺格拉德博士所说,“医学科学家的关注点主要集中在确保人类在太空中得到支持并安全返回地球——同时实现预定的工程目标。”维诺格拉德继续说,这意味着监测之外的医学研究“次于任务的工程目标”。3

客舱解决方案 - AviTrader
2017 年 3 月 30 日,空客在 A380 试飞中成功安装了利勃海尔宇航的 3D 打印扰流板执行器阀块。这是空客飞机上首个 3D 打印的主要飞行控制液压部件。由钛粉制成的阀块是利勃海尔宇航扰流板执行器的一部分,为 A380 提供主要的飞行控制功能。它具有与传统钛锻件阀块相同的性能,但重量减轻了 35%,零件数量更少。与传统铣削工艺相比,该制造工艺简单且材料效率极高:细钛粉通过激光熔化并逐层堆积,从而将钛废料降至最低。利勃海尔宇航与空客和德国开姆尼茨工业大学密切合作,开发了 3D 打印液压部件。该项目部分由德国联邦经济和能源部资助。3D 打印主飞行控制液压部件的首次飞行测试表明,利勃海尔宇航和空客正在开创未来飞机系统的开发和制造方式。他们对 3D 打印的持续投资和研究现在显然取得了成果。
无人驾驶运营理念及政策影响...
图 1。俄亥俄州/印第安纳州 UAS 中心飞行操作程序。...................................................... 13 图 2。俄亥俄州/印第安纳州 UAS 中心试飞步骤和流程。......................................................... 14 图 3。Yamaha R-Max。......................................................................................................... 14 图 4。美国 290 号公路上的 SH 6 — 平移、倾斜和缩放与 400 英尺高程视图。.................... 20 图 5。UAS 响应单元示例。............................................................................................. 24 图 6。操作场景 1:事件监控。........................................................... 27 图 7。操作场景 2:态势感知。......................................................... 28 图 8。操作场景 3:困难地形、安全或机动性。................................ 30 图 9。操作场景 4:自然事件。......................................................................... 31 图 10。操作场景 5:致命事故现场测绘。................................................. 32 图 11。TIM 系统的国家 ITS 服务包图形。.......................................... 34 图 12。UAS-TIM 架构。.............................................................................................. 34 图 13。奥斯汀空域分析。......................................................................................... 45 图 14。大学城空域分析。...................................................................................... 45 图 15。达拉斯-沃斯堡空域分析。...................................................................................... 46 图 16。埃尔帕索空域分析。............................................................................................. 46 图 17。休斯顿空域分析。................................................................................................ 47 图 18。里奥格兰德河谷空域分析。................................................................................ 47 图 19。圣安东尼奥空域分析。................................................ . ...................................... 48