XiaoMi-AI文件搜索系统
World File Search System误差

圆柱形件数控车削加工同轴度误差分析及优化
摘要 在工业应用中,具有精确几何公差的高精度旋转轴通常以微米级的间隙安装在齿轮和壳体之间。在大多数此类应用中,动态循环载荷是不可避免的,这会对关键部件的疲劳寿命产生不利影响。在加工过程中确保严格的尺寸公差和同轴度是非常必要的,因为它会影响许多应用中的旋转特性。因此,同轴度误差的控制在旋转轴和高精度机床中起着至关重要的作用。然而,使用高精度加工会大大增加制造成本。因此,一种能够潜在地降低同轴度误差的经济高效的加工工艺具有很高的工业重要性。本研究试图通过优化参数(切削速度、进给速度、切削深度和切削刀尖半径)来实现圆柱形加工零件的最小同轴度误差。计划进行以下实验:中心复合设计矩阵和统计分析应用响应面法确定了机器参数对高强度 Al 7075 合金同轴度误差的影响。进给速度和切削深度因素对同轴度误差有显著影响。所有加工参数对同轴度误差均表现出非线性影响,这定义了强相互作用因素的影响。通过确定一组加工参数,即应用 Big-Bang 和 Big Crunch 和 Rao(Rao-1、Rao-2 和 Rao-3)算法,利用推导出的经验方程来最小化同轴度误差。Rao 算法在计算工作量和求解精度方面均优于 Big-Bang 和 Big Crunch 算法。通过实验验证了 Rao 算法的结果,同轴度误差降低了 1.013 µm,与 CCD 实验相比提高了 72.6%。

数据科学和genai
•介绍机器学习•监督和不受监督的学习之间的差异•分类和回归之间的差异•机器学习应用•数据科学项目生命周期•线性回归理论•线性回归理论•成本功能•使用梯度下降使用梯度下降的优化梯度解释•梯度解释•模型下降•模型误差•平均正方误差•平均正方误差•多态性误差•多态多态,多态多态,多态,多态,多态,多态,多态,多态,多态,多态,多态,多态,多态误差,使用Python进行回归•过度拟合,不适合,合适的拟合•逻辑回归•理解逻辑回归一步一步矩阵

空中交通管制 (ATC) 的脑力工作量...
从22×8螺旋桨(弦长4.5cm)的测试设备上的误差对比结果来看,误差差最大为7.143%,最小为2.663%,平均误差为4.178%。 22×8螺旋桨(5cm弦)最大误差差为8.824%,最小误差为1.893%,平均误差为3.719%。 4 结论 已对 dle-55cc 发动机推力进行了计算和测试。然后通过比较静态推力计算器值和已进行的测试设备测试数据来验证获得的发动机测试结果,然后查找所使用的燃油消耗值。将测得的推力结果与静态推力计算器值进行比较,得到平均差值。从测试设备上的误差比较来看,22×8螺旋桨(弦长4.5cm)得到的平均误差为4.178%。同时,产生的22×8螺旋桨(5cm弦)误差为3.719%,获得的燃油消耗值为588,600-20,708(N/kW.hr),这显示出良好的降低水平,因此所使用的发动机更加高效。在使用中。从测试结果来看,该发动机试验台具有准确性,能够产生良好的发动机性能,可作为测试和其他学习工具。参考文献 [1] Arismunandar, W. 2002。 “燃气轮机和推进电机简介”。万隆:ITB。 [2] 安德烈·德索萨. 2017.“无人机推进试验台开发
数控车削圆柱形零件同轴度误差分析及优化
摘要 在工业应用中,具有精确几何公差的高精度旋转轴通常在齿轮和壳体之间以微米级间隙安装。在大多数这些应用中,动态循环载荷是不可避免的,这会对关键部件的疲劳寿命产生不利影响。在加工过程中确保严格的尺寸公差和同轴度是非常可取的,因为它会影响许多应用中的旋转特性。因此,同轴度误差的控制在旋转轴和高精度机床中起着至关重要的作用。然而,使用高精度加工会大大增加制造成本。因此,一种能够潜在地减少同轴度误差的经济高效的加工工艺具有很高的工业重要性。本研究通过优化参数(切削速度、进给率、切削深度和切削刀具刀尖半径)尝试实现圆柱形加工零件的最小同轴度误差。计划进行实验,即中心复合设计矩阵和统计分析通过应用响应面法确定机器参数对高强度 Al 7075 合金同轴度误差的影响。进给率和切削深度因素对同轴度误差有显著影响。所有加工参数对同轴度误差均表现出非线性影响,这定义了强相互作用因素的影响。通过确定一组加工参数,即应用 Big-Bang 和 Big Crunch 以及 Rao(Rao-1、Rao-2 和 Rao-3)算法,使用推导出的经验方程来最小化同轴度误差。Rao 算法在计算量和解决方案精度方面均优于 Big-Bang 和 Big Crunch 算法。Rao 算法的结果经过实验验证,同轴度误差降低至 1.013 µm,与 CCD 实验相比提高了 72.6%。
圆柱形件数控车削加工同轴度误差分析及优化
摘要 在工业应用中,具有精确几何公差的高精度旋转轴通常以微米级的间隙安装在齿轮和壳体之间。在大多数此类应用中,动态循环载荷是不可避免的,这会对关键部件的疲劳寿命产生不利影响。在加工过程中确保严格的尺寸公差和同轴度是非常必要的,因为它会影响许多应用中的旋转特性。因此,同轴度误差的控制在旋转轴和高精度机床中起着至关重要的作用。然而,使用高精度加工会大大增加制造成本。因此,一种能够潜在地降低同轴度误差的经济高效的加工工艺具有很高的工业重要性。本研究试图通过优化参数(切削速度、进给速度、切削深度和切削刀尖半径)来实现圆柱形加工零件的最小同轴度误差。计划进行以下实验:中心复合设计矩阵和统计分析应用响应面法确定了机器参数对高强度 Al 7075 合金同轴度误差的影响。进给速度和切削深度因素对同轴度误差有显著影响。所有加工参数对同轴度误差均表现出非线性影响,这定义了强相互作用因素的影响。通过确定一组加工参数,即应用 Big-Bang 和 Big Crunch 和 Rao(Rao-1、Rao-2 和 Rao-3)算法,利用推导出的经验方程来最小化同轴度误差。Rao 算法在计算工作量和求解精度方面均优于 Big-Bang 和 Big Crunch 算法。通过实验验证了 Rao 算法的结果,同轴度误差降低了 1.013 µm,与 CCD 实验相比提高了 72.6%。

来自有限时钟参考框架的量子纠错码的连续横向门组
在介绍参考帧纠错任务 [ 1 ] 之后,我们展示如何通过使用参考帧与时钟对齐,将一组连续的阿贝尔横向逻辑门添加到任何纠错码中。据此,我们进一步探索一种绕过 Eastin 和 Knill 的无行定理的方法,该定理指出,如果局部错误是可校正的,则横向门组必须是有限阶的。我们可以通过在解码过程中引入一个小错误来做到这一点,该错误随着所用帧的维数而减小。此外,我们表明,这个误差有多小与量子钟的精确度之间存在直接关系:时钟越精确,误差越小;如果时间可以在量子力学中完美测量,则会违反无行定理。在多种参考系和误差模型的场景下研究了误差的渐近缩放。该方案还扩展到未知位置的误差,我们展示了如何通过参考系上的简单多数投票相关误差校正方案来实现这一点。在展望中,我们讨论了与 AdS/CFT 对应和 Page-Wooters 机制相关的结果。
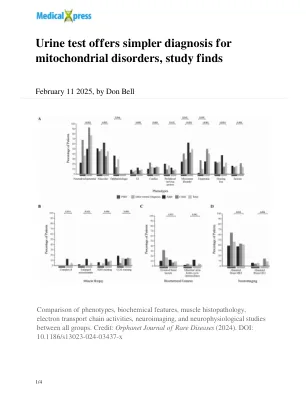
尿液测试提供了线粒体疾病的更简单诊断,研究发现
这项研究揭示了这些疾病如何影响成年人和儿童之间的差异。由于细胞中线粒体DNA的误差,成年人更有可能患有障碍,而在儿童中,由于细胞中的核DNA误差更可能是细胞中的核DNA误差。研究人员还发现,肌肉问题在成年人中更常见,大脑和发育问题在儿童中更为常见。

克服量子错误校正中的泄漏
量子信息从量子的两个计算状态中泄漏到其他能量状态是量子误差校正的主要挑战。在操作错误校正算法期间,泄漏会随着时间的推移而构建,并通过多数相互作用扩散。这会导致相关的误差,从而降低了逻辑误差的指数抑制,从而挑战了量子误差校正的可行性,这是通往耐故障量子计算的路径。在这里,我们在一个量子处理器上演示了一个距离3的表面代码和距离-21位 - 翼型式代码,该量子处理器为每个循环中的所有量子机删除泄漏。这缩短了泄漏的寿命,并削弱了其传播和引起相关错误的能力。我们报告了编码逻辑状态的数据量量量量的稳态泄漏人群的降低,整个设备的平均泄漏群体低于1×10 -3。我们的泄漏清除过程有效地将系统返回到计算基础上。将其添加到代码电路中会防止泄漏诱导跨周期的相关误差。通过这种证明可以包含泄漏的证明,我们已经解决了在大规模上进行实用量子误差校正的关键挑战。

探索新兴仪器的承载潜力...
– 主动偏航控制:95% 误差为 7 度,超过所有 5 分钟时间窗口的 95%。 – 被动俯仰和滚转控制,典型误差为 +/- 2 度。 – 滚转、俯仰和偏航角度由姿态传感器测量,精度为 +/- 0.5 度。