XiaoMi-AI文件搜索系统
World File Search System误差分析

关于估计地图模型误差和 GPS...
为了确定是否可以安全地执行所需的操作,谨慎的导航员必须了解其车辆定位系统的当前空间不确定性以及用于描绘战区的导航地图模型的空间不确定性。从安全导航的角度来看,了解数据的准确性与数据本身一样重要。本文讨论了 GPS 车辆定位误差和特定于水深地图模型(图表)的相对较大的数据建模误差对电子海图 (EC) 的影响。它提出并演示了软件解决方案,这些解决方案可以统计评估这两种空间不确定性,并在 EC 环境中以图形方式集成这两个随机模型。本文还记录了加拿大水文服务局进行的一项实验,旨在确保实时 DGPS 用户计算出统计上有效的位置误差估计。实验对使用伪距冗余的传统实时误差分析获得的位置误差估计进行了地面实况分析。利用此地面实况信息,根据经验确定了改进的伪距误差模型。新的伪距误差模型使用 Novatel GPS 接收器计算的估计伪距方差不断更新,而不是应用最小二乘调整中典型的恒定先验伪距方差。该动态范围误差模型有效地减少了观察到的误差与其预测的误差估计之间的统计偏差。改进的范围误差模型还显著提高了位置解的性能。修改后的软件计算的所有 DGPS 位置的定位精度均优于 0.5 米。

Anss Hameed
•开发基于Python的深度学习交易者,受到LOB快照和基线交易策略的培训,利用技术指标(例如rsi)与超人贸易代理商竞争(例如zip,shvr)。•在C + +中分布式HFT市场间套利模拟中使用XGBoost评估深度学习交易者。协整驱动的对技术指标的交易| Python,Pandas,Numpy 2025年1月•使用统计协整测试(ADF)识别具有固定差的库存对,以确保均值转换潜力。•使用布林乐队,RSI和Z分数作为进入/出口信号,通过停止损害和庞然大意的级别构建了回测引擎。•在4年内达到1.06的夏普比率为115%,表明稳健和风险调整后的盈利能力。随机选项定价引擎(蒙特卡洛和黑色choles)| Python 2024年11月•使用几何布朗运动在50多个场景中模拟资产价格路径,应用神经网络以进行波动性预测,以将定价准确性提高10%,将黑链链作为基准。•构建了一个实时交互式UI,以进行参数调整和视觉误差分析,从而通过超参数调谐优化Monte Carlo性能,MC和B-S输出之间的平均误差<5%。AI社交媒体|产品经理,客户联络与开发人员(Spacenxt Labs)| Python,JavaScript 2023年9月 - 2024年5月
关于估计地图模型误差和 GPS...
为了确定是否可以安全地执行所需的操作,谨慎的导航员必须了解其车辆定位系统的当前空间不确定性以及用于描绘战区的导航地图模型的空间不确定性。从安全导航的角度来看,了解数据的准确性与数据本身一样重要。本文讨论了 GPS 车辆定位误差和特定于水深地图模型(图表)的相对较大的数据建模误差对电子海图 (EC) 的影响。它提出并演示了软件解决方案,这些解决方案可以统计评估这两种空间不确定性,并在 EC 环境中以图形方式集成这两个随机模型。本文还记录了加拿大水文服务局进行的一项实验,旨在确保实时 DGPS 用户计算出统计上有效的位置误差估计。实验使用传统的伪距冗余实时误差分析获得了位置误差估计,并对其进行了地面实况分析。利用这些地面实况信息,根据经验确定了改进的伪距误差模型。新的伪距误差模型使用 Novatel GPS 接收器计算出的估计伪距方差不断更新,而不是应用最小二乘调整中典型的恒定先验伪距方差。这种动态范围误差模型有效地减少了观测到的误差与其预测的误差估计之间的统计偏差。改进的范围误差模型还显著提高了位置解的性能。修改后的软件计算的所有 DGPS 位置的定位精度均优于 0.5 米。

对导航级 RLG SIMU 类型 iNAV-RQH 的调查
本研究介绍了使用我们的环形激光陀螺仪 ( RLG ) 导航级捷联惯性测量单元 ( SIMU ) 类型 iNAV-RQH 进行的特性和一些评估实验结果,精度为 1 nmi/h。在简要介绍 SIMU 的主要特征后,给出了惯性传感器构造原理和误差模型的描述。为了评估我们的捷联 IMU,我们设计了实验室和现场测试,在中等精度转盘和汽车导航任务框架内进行,使用 DGPS(差分 GPS)参考解决方案(在我们的案例中,是一种即时 ( OTF ) 运动学 DGPS 解决方案,在整数秒的常规时期提供精确的位置参考)。使用专用软件 Kingspad 获得后处理的 3-D 惯性或集成 GPS/INS 解决方案。还介绍了噪声和误差分析,以及实验室和现场测试的具体结果。位置精度在亚 dm 域内(与 cm 精度 DGPS 参考轨迹的差异,1-σ 相对误差约为 1 cm),驱动轨迹周长分别为数百米。加速度误差在 mGal 域内(经过约 60…100 秒的适当过滤后),姿态误差在角秒范围内,iMAR 的 RLG SIMU 类型 iNAV-RQH 被认为完全适合精确导航、测量和精确重力测定。[Dorobantu et al., 2004] 中已经给出了一些初步结果,目前的扩展形式包括传感器技术和误差模型的更多内部内容,以及使用 ZUPT s(惯性导航系统零速度更新)的室内 INS 导航实验。附录中介绍了补充实验,如静态倾斜、阻尼测试或 SIMU 的静态评估,以及对 ISA(惯性传感器组件)的更多了解,或从已注册的 SIMU 数据直接推导大地测量参数。

使用单次水下弹性 - 拉曼激光雷达
摘要:LIDAR已成为水中垂直分析光学参数的有前途的技术。单光子技术的应用使紧凑型海洋激光雷达系统的发展,促进了其在水下部署。这对于进行空气海界面上没有干扰的海洋观测至关重要。然而,同时在532 nm(βM)处于180°处的体积散射函数,而在弹性反向散发信号中,在532 nm(k m激光拉尔)处的激光雷达衰减系数仍然具有挑战性,尤其是在几何近距离信号中受到了几何形状重叠因子(GOF)的影响。为了应对这一挑战,这项工作提出了添加拉曼通道,使用单光子检测获得了拉曼反向散射的轮廓。通过用拉曼信号将弹性反向散射信号归一化,归一化信号对激光雷达衰减系数变化的敏感性大大降低。这允许将扰动方法应用于反转βM并随后获得K M LIDAR。此外,可以降低GOF和激光功率中波动对反转的影响。为了进一步提高分层水体的反转算法的准确性,提出了迭代算法。此外,由于激光雷达的光望远镜采用了一个小的光圈和狭窄的视野设计,因此K M LIDAR倾向于在532 nm处的光束衰减系数(C M)。使用Monte Carlo模拟,建立了C M和K M LIDAR之间的关系,从而允许C M衍生物来自K M LIDAR。最后,通过反演误差分析来验证该算法的可行性。通过在水箱中进行的初步实验来验证LiDAR系统的鲁棒性和算法的有效性。这些结果表明,LIDAR可以准确地介绍水的光学参数,从而有助于研究海洋中的颗粒有机碳(POC)。

ENCS 课程描述
ENCS 课程描述 ENCS 5300. 纳米材料基础 (3):本课程重点介绍描述和解释纳米级物质特性的化学、物理和数学概念。它将强调理解自组装过程背后的分子驱动力以及用于表征所得纳米材料的方法所需的基本化学、物理和数学。它还将介绍纳米材料的应用。 ENCS 6010. 高级应用数学 (3):本课程涵盖高级数学主题,包括线性代数、数值方法、傅里叶分析、离散数学、概率和统计以及代数结构,特别强调在工程和计算科学中的应用。 ENCS 6020. 高级计算 (3):本课程提供在高端计算机、计算机网络或个人计算机上进行计算的基本知识、技能和工具。主题包括:编程和编程语言;数据结构、算法和计算复杂性;高性能计算;分布式计算;优化;统计数据分析;计算误差分析。还将介绍先进计算技术的选定工程应用。 ENCS 6030. 网络物理系统的建模与仿真 (3):研究建模、仿真和设计的原理,包括制定规范和对由彼此通信并通过传感器和执行器与物理世界交互的设备组成的网络物理系统进行分析。主题包括同步和异步模型以及定时模型、安全性和活跃性要求以及实时调度。还研究了动态系统和混合系统的建模和仿真的一些方面。 ENCS 6110. 先进机器人系统 (3):本课程主要介绍机器人变换、运动学、动力学、差分运动、运动和路径规划、操纵和移动控制。高级主题包括:多机器人系统合作和协作任务规划和执行、机器人传感器接口和集成、被动和主动感知、处理和推理。学生将有机会通过实验室动手项目了解机器人软件、传感器和硬件。ENCS 6120。机电一体化系统设计 (3):本课程旨在涵盖从机电一体化理论的初步知识到基于项目的机电一体化系统设计。本课程的多学科内容包括:机制、电子、传感器、控制策略以及控制环路中的软件、固件和硬件。本课程还讨论了将机电一体化系统与传感器、机器人系统、可编程逻辑控制器 (PLC) 和人机界面集成的技术和技能。成功完成本课程的学生应能够解决需要紧密集成机电一体化组件和子组件以支持嵌入式机电机构和控制系统的多学科工程设计项目。ENCS 6200。工程设计优化 (3):优化技术的计算机化设计方法。使用设计变量和约束制定优化问题。使用数学模型解决问题,运筹学中的确定性优化方法,线性规划模型,单纯形法,线性规划中的对偶性和灵敏度。非线性优化和多目标函数优化,约束和无约束问题。
PY581:物理高级实验室教学大纲
地点和时间 SCI 130D 和 132,星期一,上午 10:10 至下午 6:10; 617-358-1869 第 1 节从 B58 开始,然后移至 B11 进行 Ba137 实验 午餐休息时间由主任和您的合作者安排 演示时间:上午 10:00 在 SCI B58 进行第 1 节,下午 4:25 进行 AdLab 研讨会系列,并在宣布时进行 AdLab 主任 Lawrence R. Sulak,sulak@bu.edu 办公室 PRB 273 手机 617-735-7636,随时可用 住宅 617-731-2194 办公时间:星期一上午 10 点至下午 7 点在 SCI 130D,并可随时安排 首席科学家 Chris Cosby,cosbyc@bu.edu,425 591-7989 Nick Russo,nzr@bu.edu,781-974-2066 Dan Arcaro,djarcaro@bu.edu, 508-479-8049,顾问 AdLab 经理 Situ Yaokun,situ@bu.edu,215 584-7727 先决条件 1) PY354 - 现代物理学,或同等学历 2) buphy0 上的计算机帐户;如果还没有帐户,请咨询 Guoan Hu,ghu@bu.edu,3-3931 以设置一个 必备材料 您个人的四线实验室笔记本,用于用墨水记录您的实验室工作 科学计算器 粒子数据组 (PDG),每次课程都使用“粒子物理手册”。请通过电子邮件 pdg@lbl.gov/ 免费订购。作为家庭参考,您可能还想订购长篇“粒子物理评论”。这些杂志每两年由 Rev. Mod. Phys. 出版一次。您需要在实验室中定期使用手册或网站。还请熟悉 pdg.lbl.gov 上的大量在线课程 积极态度 Adlab 网站 physics.bu.edu/~sulak/AdLab 课程信息将通过电子邮件分发,并显示在课程网站上,课程大纲也保存在此网站上 您有责任了解课程大纲,并每天检查电子邮件以获取有关此课程的消息! 推荐参考资料(所有参考资料均保留在科学与工程图书馆): 1) AC Melissinos,《现代物理实验》,Academic Press,第二版。您可能希望投资于这篇文章,我经常参考它。 2) PH Bevington 和 DK Robinson,《物理科学的数据缩减和错误分析》,McGraw Hill,1992 年。3) JR Taylor,《错误分析简介》,大学科学书籍,1972 年。4) Hugh D. Young,《实验数据的统计处理:统计方法简介》,Waveland Press,1996 年。5) Louis Lyons,《物理科学学生数据分析实用指南》,剑桥大学出版社,1992 年。6) JM Butler,《线性最小二乘拟合公式》,1999 年,AdLab 网站上。摘要:我们的目标是模拟一个正在运行的研究实验室,让初级研究人员熟悉实验方法和技术。我们不会教,但会帮助您发现物理现象并掌握观察它所需的设备。有几种实验可供您大致了解当前的技术。AdLab 将为您提供在专业研究环境中工作所需的实践经验:您将获得一堆旧物件,一旦您让它们同时工作以测量新的物理可观测量或更佳的已知可观测量,它们将奇迹般地为您赢得诺贝尔奖。正如如今任何地方一样,您必须以两人为一组进行协作,尽管您的书面论文和研讨会演示文稿将独立准备。您将量化您的结果,包括统计和系统误差线。您将磨练设置和校准设备、获取数据、评估数据(包括误差分析)以及为每个实验准备物理评论快报 (PRL) 论文草稿的技能。
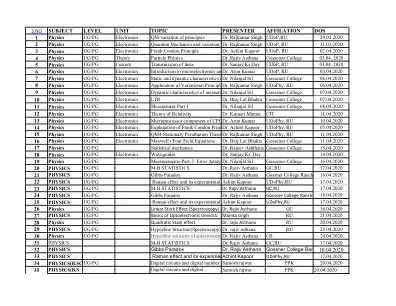
讲义表(1).xlsx
S.NO 科目 级别 单位 主题 主持人 隶属关系 DOS 1 物理学 UG/PG 电子学 QM-原理变化博士。 Rajkumar Singh UDoP,RU 29.03.2020 2 物理学 UG/PG 电子学量子力学和变化 pDr. Rajkumar Singh UDoP,RU 31.03.2020 3 物理学 UG/PG 电子学 Frank Condon 原理博士Achint Kapoor UDoP,RU 02.04.2020 4 物理学 UG/PG 理论粒子物理学博士Rajiv Asthana Gossenor College 03.04..2020 5 物理学 UG/PG 线路电流传输博士Sanjay Kr Day UDoP,RU 03.04..2020 6 物理学 UG/PG 电子学微电子学简介和博士。 Arun Kumar UDoP,RU 03.04.2020 7 物理学 UG/PG 电子学静态和动态特性 oDr。 Nilanjal Sil Gossenor College 06.04.2020 8 物理学 UG/PG 电子学变分原理的应用Dr. Rajkumar Singh UDoPhy,RU 06.04.2020 9 物理学 UG/PG 电子学 测量的动态特性Dr。 Nilanjal Sil Gossenor College 07.04.2020 10 物理学 UG/PG 电子学 LTR Dr. Braj Lal Bhakta Gossenor College 07.04.2020 11 物理 UG/PG 电子测量第 1 部分 Dr. Nilanjal Sil Gossenor 学院 08.04.2020 12 物理学 UG/PG 电子学 相对论 博士Kumari Mamta CIT 11.04.2020 13 物理学 UG/PG 电子学 CPU 的微处理器组件。 Arun Kumar UDoPhy,RU 10.04.2020 14 物理学 UG/PG 电子学 Frank Condon PrincDr 的解释。 Achint Kapoor UDoPhy,RU 05.04.2020 15 物理学 UG/PG 电子学 QM4-Stationary Perutbation Theor Dr. Rajkumar Singh UDoPhy,RU 11.04.2020 16 物理学 UG/PG 电子学麦克斯韦四个场方程博士Braj Lal Bhakta Gossenor College 11.04.2020 17 物理学 UG/PG 统计力学博士Rajeev Ashthana Gossenor College 15.04.2020 18 物理学 UG/PG 电子学波导博士桑杰·Kr.天 14.04.2020 19 物理 UG/PG 测量-第 2 部分-误差分析博士。 Nilanjal Sil Gossenor College 16.04.2020 20 物理学 UG/PG MB 统计学 Dr. Rajiv Asthana GC,RU 17.04.2020 21 物理学 UG/PG 吉布斯悖论博士Rajiv Asthana Gossner College Ranch 18.04.2020 22 物理学 UG/PG 拉曼效应及其实验 Achint Kapoor UDoPhy,RU 17.04.2020 23 物理学 UG/PG MB 统计学 Dr. Rajiv Asthana GC,RU 17.04.2020 24 物理学 UG/PG 吉布斯悖论博士Rajiv Asthana Gossner College Ranchi 18.04.2020 25 物理学 UG/PG 拉曼效应及其实验 Achint Kapoor UDoPhy,RU 17.04.2020 26 物理学 UG/PG 线性斯塔克效应(光谱学) Dr. Rajiv Asthana GC 18.04.2020 27 物理学 UG/PG 光电器件基础 Mamta singh RU 21.04.2020 28 物理学 UG/PG 二次斯塔克效应 Dr. rajiv Asthana RU 20.04.2020 29 物理学 UG/PG 超精细结构(光谱学)博士rajiv asthana RU 23.04.2020 30 物理学 UG/PG 光谱的超精细结构博士Rajiv Asthana GS 24.04.2020 31 物理学 MB 统计学 Dr. Rajiv Asthana GC,RU 17.04.2020 32 物理学吉布斯悖论博士Rajiv Asthana Gossner College Ran 18.04.2020 33 物理学 拉曼效应及其实验Achint Kapoor UDoPhy,RU 17.04.2020 34 物理学(B.SC UG/PG 数字电路和数字数Santosh rajwar PPK 20.04.2020 35 物理(BS 数字电路和数字 Santosh rajwar PPK 20.04.2020