XiaoMi-AI文件搜索系统
World File Search System调整动作

Advancing neuroscience through real-time processing of ...
大脑充当闭环系统,该系统不断响应外部环境,并根据结果调整动作。神经科学中的传统研究方法,尤其是在大脑成像实验中使用的方法,主要采用了开环范式(Grosenick等,2015)。功能性神经回路是离线分析的,随后通过操纵特定区域内的神经元活性或遗传标志物进行了测试。通过建立闭环研究范式,可以通过时间序列实时检测和测试功能集合。这些功能合奏,而不是大脑区域或遗传标记的神经种群,是神经网络的基本单位,为神经回路的解剖提供了宝贵的见解。闭环研究范式还可以捕获内部脑动力学的高维活动,并精确地阐明了学习,决策和睡眠等生理过程。
DigituSync:一款可自适应共享手势的双用户被动外骨骼手套
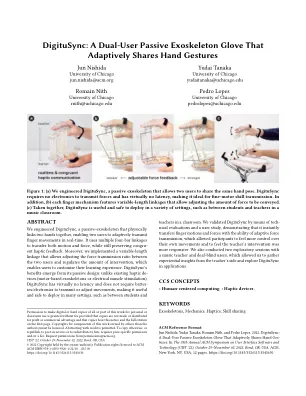
我们设计了 DigituSync,这是一种被动外骨骼,可将两只手物理连接在一起,使两个用户能够实时自适应地传输手指运动。它使用多个四连杆来传输运动和力,同时仍保持一致的触觉反馈。此外,我们实施了一个可变长度的连杆,可以调整两个用户之间的力传输比并调节干预量,从而使用户能够定制自己的学习体验。DigituSync 的优势源于其被动设计:与现有的触觉设备(基于电机的外骨骼或电肌肉刺激)不同,DigituSync 几乎没有延迟,不需要电池/电子设备来传输或调整动作,使其在许多环境中部署都非常有用且安全,例如在学生和老师之间

经过多日的练习,完成双手控制任务的从头运动学习
经过多天的练习,完成双手控制任务的从头运动学习 Adrian M. Haith 1 、Christopher Yang 2 、Jina Pakpoor 1 和 Kahori Kita 1 约翰霍普金斯大学 1 神经病学系、2 神经科学系,美国马里兰州巴尔的摩 摘要 尽管关于运动学习的许多研究都集中在我们如何调整动作以在面对强加的扰动时保持表现,但在许多情况下,我们必须从头学习新技能,或者从头学习。与适应相比,人们对从头学习知之甚少。部分原因在于学习一项新技能可能涉及许多挑战,包括学习识别新的感觉输入模式和产生新的运动输出模式。但是,即使有了熟悉的感觉线索和练习过的动作,根据当前状态快速选择适当的动作仍然是一个挑战。在这里,我们设计了一个双手手到光标映射来隔离这个控制问题。我们发现,尽管参与者对映射有明确的了解,但他们最初还是难以在这种双手映射下控制光标。然而,经过多天的练习,表现稳步提高。参与者在恢复到真实光标时没有表现出任何后遗症,这证实了参与者是从头开始学习新任务的,而不是通过适应。对目标中途运动扰动的纠正反应最初很弱,但随着练习,参与者逐渐能够对这些扰动做出快速而有力的反应。经过四天的练习,参与者在双手映射下的行为几乎与使用真实映射光标时的表现相匹配。然而,在表现水平上仍然存在微小但持续的差异。我们的研究结果说明了学习新控制器的动态和局限性,并引入了一个有前途的范例,用于研究运动技能学习的这一方面。 通讯作者:Adrian Haith 209 Carnegie 550 North Wolfe Street Baltimore, MD, 21287, USA adrian.haith@jhu.edu 简介