XiaoMi-AI文件搜索系统
World File Search System距离处


盾牌 - 陆军刑事侦缉处
采购欺诈调查培训计划:PFITP 为参与采购欺诈调查的人员提供专业培训。重点放在调查技能相关主题上,包括:财务数据分析、成本错误计费、反垄断和反回扣违规、贿赂、合同谈判欺诈、采购诚信法案、缺陷定价、虚假索赔/声明、虚假索赔法案/平行程序、审计考虑因素和有效案例陈述。PFITP 向执法调查员、审计师、分析师、律师和担任直接执法支持人员的个人开放。(https://www.fletc.gov/procurement-fraud- investigation-training-program)

项目551.04000010 - 处理过的木桩
1分。木材桩的尖端应被锯成正方形,以便切断时,末端垂直于桩的纵轴或直径不少于4英寸的点。2个屁股。木材桩的屁股应被锯为正方形。3个接头。木材桩不得剪接。B.驾驶方法。桩的驾驶应使用空气/蒸汽,柴油或液压锤进行。驾驶顺序将由工程师确定。用于驾驶木材桩的设备应符合第551-3.01.D节的要求,除非将用于驾驶的锤子使用的最低额定功率应为7006 ft-lbf(9.5 kJ),每次打击,最大额定功率的惊人能量应为13,497 ft-lbft-ft-lbfft(18.33 kj)(18.3 kj)。
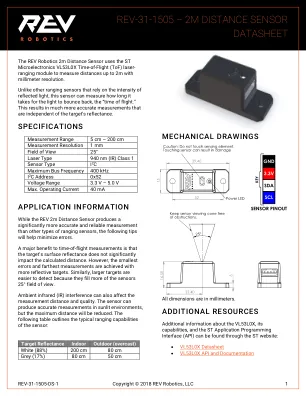
REV-31-1505 – 2M 距离传感器数据表
飞行时间测量的一个主要优点是目标的表面反射率不会显著影响计算的距离。但是,反射率更高的目标可实现最小的误差和最远的测量。同样,较大的目标更容易检测,因为它们占据了传感器 25° 视野的更多部分。

讲座 7:测量量子态之间的距离
场景:从集合中辨别状态。在前面的场景中,Bob 以概率 λ 收到量子态 ρ 0 ,以概率 1 − λ 收到量子态 ρ 1 。现在让我们将这个场景推广到两个以上的量子态:同样,Alice 站在一个有 n ∈ N 个按钮的设备旁边。按下按钮 “i” 后,设备从某个量子态集合 { ρ 1 , ... , ρ n } ⊂ D ( H ) 中发射一个量子态为 ρ i 的粒子。同样,Bob 抓住粒子,使用 POVM µ : { 1 , ... , n } → B ( H ) + 对其进行测量,并猜测如果 Alice 收到该结果,则他按下了按钮 j 。假设 Alice 按照概率分布 p ∈P{ 1 , ... , n } 按下按钮,Bob 猜测的最佳成功概率是多少?同样,给定一个特定的 POVM µ : { 1 , . . . , n } → B ( H ) + ,我们可以将成功概率表示为

我们距离新冠疫苗还有多远?
本综述概述了 COVID-19 候选疫苗的主要方面和疾病的病理生理学。本综述分析了针对 COVID-19 开发的生物技术候选疫苗的类型、其保护程度和疾病的病理生理机制。研究了开发生物技术候选疫苗的关键所基于的文献数据。回顾了可以参考各种生物技术候选疫苗的数据。为此,利用了最新的文献数据。成功开发需要技术基础设施的疫苗的方法是综合从长期试验中获得的数据并随后将其付诸实践。通过重组 DNA 技术开发的疫苗将成为人们进一步研究的灵感来源。经过快速的疫苗开发过程,COVID-19 疫苗的使用可以在人群中成为主流以预防疾病。作为这些实践的结果,将在阶段研究后评估哪种疫苗更安全、更可靠和更有效。

1距离很长一段路?当代人造...
Sorich 4,Ishish Seth 5,James Gorcilov 6,Matthew Lim 1,Liam McCoy 7,Andrew vanlint 1,6,

悬垂距离的电池检查-Dragonfly
通过计算机断层扫描(CT)进行的X射线检查允许对电池进行质量评估,对于锂离子电池特别有用。ct可以轻松检查空隙,裂缝,分配和阳极分量之间的距离距离。在此应用程序注释中,我们使用Dragonfly 3D World软件展示了CT的电池检查功能。特别是,对深度学习模型进行了训练,可以自动分割悬垂 - 该模型可以应用于任何类似的扫描 - 例如,如果您扫描了100个电池,则可以使用相同的模型在所有扫描中分割悬垂。

将机器人几何形状表示为距离字段
摘要 - 在这项工作中,我们提出了一种新的方法,将机器人几何形状表示为距离场(RDF),该方法将签名距离场(SDF)的原理扩展到铰接的运动链。我们的方法采用了伯恩斯坦多项式的组合,以高精度和效率编码每个机器人链路的签名距离,同时确保SDF的数学连续性和不同性。我们进一步利用机器人的运动学链来在关节空间中产生SDF表示,从而允许以任意关节配置进行稳健的距离查询。提议的RDF表示在任务和关节空间中都是可区分和平滑的,使其直接集成到优化问题。此外,机器人的0级集合对应于机器人表面,可以将其无缝整合到全身操纵任务中。我们在模拟和7轴Franka Emika机器人中进行了各种经验,与基线方法进行了比较,并证明了其在避免碰撞和全身操纵任务方面的效率。项目页面:https://sites.google.com/view/lrdf/home