XiaoMi-AI文件搜索系统
World File Search System距离远

经济自由度距离对印度入境跨境收购量的影响:经济距离的调节作用
摘要:跨境收购 (CBA) 是一种外国直接投资形式,在过去 30 年中急剧增长。印度一直是新兴经济体中 CBA 的主要目的地之一,因此探索其决定因素颇有意思。尽管 CBA 研究浩如烟海,但经济自由的作用却研究不足。在此背景下,通过扩展对影响跨境收购 (CBA) 活动的距离度量的了解,我们研究了经济自由距离对印度入境 CBA 量的影响以及经济距离的调节作用。我们从汤姆森的 EIKON 并购数据库中收集了 979 个观测数据,研究期涵盖 1990 年至 2020 年。我们发现经济自由距离对印度的入境 CBA 量产生负面影响。此外,经济距离显著缓和了它们的影响。这些结果表明,印度应加强其经济自由度并稳步增长,以吸引更多的 CBA 量流入。这些发现对于跨国公司和政策制定者来说具有重要的理论和实践意义,可以帮助他们使印度等新兴经济体成为 CBA 活动的理想目的地。
跨距离技术中心年度报告
P4 Norrbotten 报告了“循环食品生产的未来”会议的情况,会议探讨了当前的陆基鱼类养殖和昆虫养殖战略,并强调了新技术在将这些愿景变为现实方面的作用。主要目标是开发能够在循环和环保系统中进行鱼类养殖和蔬菜种植的技术。这里的重点是封闭循环中残留产品的回收利用。此外,人们正在齐心协力整合昆虫和微藻养殖,以创造比传统做法更可持续的鱼饲料。微藻富含 omega-3 脂肪酸,可以满足鱼类对这种必需营养素的需求,因为它们自己不会生产这种营养素。该计划被称为智能食品生产系统 (IFPS),由 Formas 资助。

计算系统发育树之间的距离
描述实现了树木相似性的度量,包括基于信息的广义鲁滨逊距离距离(系统发育信息距离,聚类信息距离,匹配的拆分信息距离;史密斯2020); Jaccard-Robinson-fivt距离(Bocker等人2013),包括Nye等。(2006)公制;匹配的分裂距离(Bogdanowicz&Giaro 2012);最大协议子树距离; Kendall-Colijn(2016)距离,以及最近的邻居交换(NNI)距离,近似于Per li等人。(1996)。包括用于可视化树空间映射的工具(史密斯2022),用于识别树木的岛屿(Silva and Wilkinson 2021),用于计算树木和树木的中间体,以计算树木和跨越树木的中间体。

距离成像计量:调查、校准和...
近年来,已经出现了许多用于捕捉三维环境和物体的传感器系统。除了激光扫描仪和大地测量全站仪外,这里还必须列举立体视觉和基于三角测量的系统。特别是激光扫描仪在速度和准确性方面已成为最先进的技术,能够捕捉数十米大小的物体。激光扫描仪的主要缺点是它们的顺序操作模式。它们逐点测量。几年前,开发了一种功能齐全的新技术,能够同时以高分辨率捕捉环境。所谓的范围成像 (RIM) 或闪光激光雷达相机基于数字成像技术,并具有测量每个像素中相应物体点距离的能力。距离测量基于直接或间接飞行时间原理。由于其并行采集高达视频帧速率,RIM 相机甚至可以捕捉移动物体。就光学依赖性而言,可以得出所捕获场景的 3-D 坐标。距离测量的标称精度为几毫米。如果属性和特性变得稳定且可预测,RIM 可能成为许多应用的首选技术。例如,汽车、机器人和安全系统。标称坐标和测量坐标之间的显著偏差发生在几厘米的范围内。只有深入的研究才能帮助达到这里的理论极限。本论文讨论了影响 RIM 相机测量的几个方面。首先,简要介绍与 RIM 相关的基本技术。除了成像和距离测量方法外,RIM 还区分了两个基本原理。此外,重点放在特定的限制上。在这项工作期间,有三种不同的相机问世:瑞士 CSEM / MESA Imaging 的 SwissRanger SR-2 和 SR-3000,以及后来德国 PMDtec 的 3k-S。这三款相机基于间接飞行时间原理,配备了不同的复杂功能。除了集成的校准和校正功能外,抑制背景照明也是主要功能之一。但是,这些相机仅用于高度发达的演示。根据所需权利要求,对特定应用领域(如汽车或机器人)的适应性可产生专门的属性。对现有相机类型的分析有助于更深入地了解该技术。所分析相机的原始数据精度不超过几厘米。为了研究现有相机的属性,必须开发特殊的实验装置。这项工作的主要部分涉及 RIM 相机组件的研究和校准。通过摄影测量相机校准解决光学系统的几何偏差。根据偏差和统计数据分析距离测量系统。因此,指出了精度和准确度的局限性。除了散射效应的影响外,还讨论了积分时间、发射系统和入射角、目标反射率、外部和内部温度以及最终的线性度和固定模式噪声。此外,还介绍了一种系统校准过程的方法。由于影响参数的复杂性,尚未对各种影响参数的测量数据进行完整的校正。但高度系统的依赖关系预示着未来会出现复杂的校准程序。这项工作有助于理解传感器。

节能且注重隐私的社交距离......
摘要 — 低分辨率红外 (IR) 传感器与机器学习 (ML) 相结合,可用于在室内空间实施隐私保护社交距离监控解决方案。然而,需要在物联网 (IoT) 边缘节点上执行这些应用程序,这使得能源消耗至关重要。在这项工作中,我们提出了一种节能的自适应推理解决方案,由一个简单的唤醒触发器和一个 8 位量化卷积神经网络 (CNN) 的级联组成,该解决方案仅用于难以分类的帧。在物联网微控制器上部署这种自适应系统,我们表明,在处理 8x8 低分辨率红外传感器的输出时,与基于静态 CNN 的方法相比,我们能够将能耗降低 37-57%,准确度下降不到 2%(83% 的平衡准确度)。索引术语 — 边缘计算、自适应推理、社交距离、能源效率、红外传感器
量子距离到不可控性和量子速度......
就像我们日常使用的计算机一样,普适性——原则上运行任何算法的能力——是量子计算的核心概念。在当前证明普适性的竞赛中,以及在更大的系统中首次成功报告普适性[1],这一点比以往任何时候都更加真实。人们经常争论[2],普适性本身就是普遍的,例如几乎所有系统都是普适的,如果不是,稍微改变一下参数就会变成普适的。即使在嘈杂的系统中也是如此,在这种系统中,普适性需要与错误校正相结合。然而,我们认为,这还有另一面:如果任何非普适系统接近普适系统,那么许多普适系统也危险地接近非普适系统。那么普适性可能是不稳定的或低效的。事实上,大自然似乎不愿探索高维动力学[3],而简单的非普适系统往往是很好的近似值。致力于设计量子光学中的弱非线性、超导系统中的弱非谐性或避免固态系统中的光谱拥挤的实验物理学家非常清楚这些限制。在这里,我们将这种直觉放在一个精确的框架中,我们称之为可控性的量子距离,并展示它与一个众所周知的难以计算但独立有趣的量的关系:量子速度极限 [4–6]。值得指出的是,有许多不同的速度极限,一些用于状态变换,一些用于幺正变换;一些用于不受控动力学,一些用于受控动力学,请参阅 [4] 中的综述。我们在这里关注的是系统的受控演化。
情况说明书 - 远北地区规划准备
考虑到参与初期收到的大量反馈,区域计划草案预计将于 2024 年底完成。预计 2025 年初将就区域计划草案开展法定参与和协商。将开展参与活动,以支持社区和利益相关者的广泛参与,并提供面对面和在线反馈的机会。这些参与活动的细节将在区域计划草案的制定过程中制定。

MiraSäe:基于GAAS的远场630 nm ...
半导体设备在电子行业中起着至关重要的作用。这些设备包括从领先的硅技术到复合半导体方法的各种类型。尤其是IIII-V复合半导体激光器在几十年中变得越来越重要,在各种领域(例如微电子,光电子学和光学电信)中找到了应用。半导体的多功能性允许对其属性进行自定义修改,以满足特定应用程序的需求。在设计光学元件时,半导体激光器的远场是至关重要的参数,因为许多半导体激光应用需要与单模光纤建立足够的连接。使用单模激光器设备,可以将更多功率传递到光纤。此外,从光学的角度来看,单模式激光器更好,因为光线更容易对齐。因此,使用单模半导体激光比构建复杂的光学系统要容易得多。在本文中,基于GAAS的630 nm区域半导体激光器的远场是与Modulight Corporation合作的优化。目标是了解制造步骤和选定的设备几何形状如何影响这些激光器的远场模式,从而改善对设备过程和过程产量的控制。远场高度依赖于激光设备的尺寸,因此,将两种不同的底物(638 nm和633 nm)与不同的尺寸一起使用以进行比较。除了远场外,还分析了光电压和光谱测量值。此外,为了更好地了解脊指导的光学特性和几何形状之间的依赖性,使用扫描电子显微镜测量了脊的尺寸。本论文中使用的激光条是通过光刻的步骤和等离子体蚀刻来捏造的。否则两个底物的处理都是相同的,但是633 nm底物的蚀刻时间更长,从而产生了更深的蚀刻深度。两个设备都使用了五个不同的脊宽度和三个不同的空腔长度。将实现的脊尺寸和调间模式行为与630 nm区域半导体激光结构的这些参数的建模结果进行了比较。脊的尺寸的表征结果显示了两个过程的各向异性和平滑档案。633 nm设备的蚀刻时间较长,导致脊比638 nm设备深507 nm,这是预期的。与638 nm设备相比,具有更深山脊的633 nm设备具有更深的山脊的阈值电流和输出功率变化较小。这项工作的目的是实现具有单模空间操作的激光器,该激光器是用633 nm激光器获得的。最佳尺寸为1000 µm的腔长为1.8 µm和3.4 µm的脊宽度,腔长为1500 µm,脊宽为2.2 µm。对于较浅的山脊深度,即638 nm激光器,所有选定的脊宽度和长度均显示多模具操作。此外,模拟结果很好地支持了实验结果。
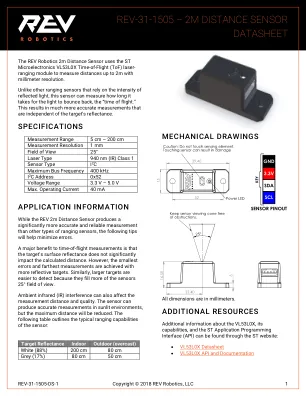
REV-31-1505 – 2M 距离传感器数据表
飞行时间测量的一个主要优点是目标的表面反射率不会显著影响计算的距离。但是,反射率更高的目标可实现最小的误差和最远的测量。同样,较大的目标更容易检测,因为它们占据了传感器 25° 视野的更多部分。