XiaoMi-AI文件搜索系统
World File Search System车辆

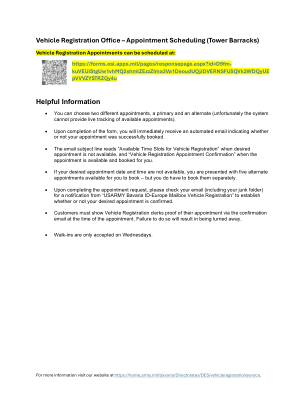
车辆到车辆数据通信通过光...
摘要 - 二十一世纪的特征是技术进步和自动化,增强了生活的舒适度和便利性。智能汽车由于自动化和嵌入式系统的进步而变得越来越受欢迎。传统的汽车模式正在现代化智能汽车,使全球企业投资于其开发和制造业。在这里,使用Li-Fi发射器和接收器电路在汽车之间传输数据,其发射器安装在前运行车辆的尾灯上,而接收器电路在前侧。为了避免崩溃,第二辆车的接收器电路在接收到通过可见光通信中传递的计算速度后修改其速度。本文提出了一种识别和防止汽车碰撞和事故的方法。

自动化车辆的接受程度低于其他车辆
抽象道路交通事故是全球死亡的主要原因,年龄在2 - 59岁之间。几乎所有死亡都是由于人为错误。自动化车辆可以降低死亡风险,交通拥堵和对人类驱动车辆的空气污染。但是,它们的采用取决于消费者接受等因素。在全国代表性的美国人样本(N 5 580)和直接复制(n 5 193)中,我们发现消费者比其他消费者更喜欢自身的汽车自动化水平,而不是其他人。这种差异是由自我增强的比较评估介导的。相对于自动车辆,消费者认为它们比其他驱动程序更安全,更值得信赖的驱动程序。在第二个例外(n 5 803)中,对自动化功能的评估增强,对自动化的能力的评估没有不同的评估,对自我和他人的偏好表达了不同的偏好。我们的发现显示了偏见的自我评估如何减少自动化车辆的接受。这对寻求增加自动车辆接受的决策者和公司产生了实用的见解。r
您的车辆,我们的导航
当您的蚂蚁驱动车辆到达客户的网站时,您的团队的第一份工作将是确保其蚂蚁导航系统正确理解车辆的特定参数。此步骤很重要,因为在运输过程中,可以轻松地将车辆的组件(例如蚂蚁用于定位的LiDAR激光扫描仪)轻易地脱离对齐。

车辆通信
智能运输系统通过实现车内通信来增强道路安全性至关重要。由于无线通信链接的性质,存在几种潜在的攻击风险,包括模仿,修改和重播。确保车辆临时网络(VANETS)的安全性免受恶意活动的安全性,安全性终端之间的安全数据交换,特定的车辆到所有东西(V2X)通信,成为需要关注的关键技术挑战。VANET应用程序的现有身份验证方法主要依赖于基于加密的技术。物理(PHY) - 莱默身份验证的出现已获得突出,利用无线通道和硬件瑕疵的固有特征来区分无线设备。基于Phy-Layer的身份验证不是加密方法的独立替代方案,但它显示出作为对货物中重新认证的补充方法的潜力,被称为“跨层身份验证”。这项综合调查彻底评估了基于加密的基于加密,基于PHY层和基于跨层的身份验证方法。此外,这项调查还深入研究了不同的第六代(6G)和超越技术,例如可重新配置的智能表面(RIS)和联合学习,以提高在有效攻击者的情况下增强PHY-Layer身份验证性能。此外,还提供了对跨层身份验证方法优势的深入见解,同时还探索了各种最新的Vanet安全技术。在这些高级方法上提供了详细的技术讨论,得出的结论是,它们可以显着增强智能运输系统的安全性,从而确保更安全,更有效的车辆通信。
车辆开发
图1。2019年基于道路的车辆的百分比2图2。2019年运输部门燃油消耗的百分比3图3。2019年运输部门的温室气体排放百分比4图4。印度尼西亚电动汽车数量17图5。Gojek在开发电动汽车生态系统方面的合作。25图6。巴厘岛电动汽车数量26图7。Transjakarta商业模型计划45图8。Transjakarta业务计划进行改造46图9。现有的电动4 Wheelers商业模型计划49图10。中国NIO电池交换操作员的业务模型50图11。电力4 Wheelers出租车的业务模型与电池交换方案51图12.现有的电动2轮毂骑行公司的商业模型54图13。电动2 Wheeler的商业模型,带有转换和补贴55



VPI:车辆计算的车辆编程接口
摘要软件定义的车辆(SDV)的出现以及自动驾驶技术结合了车辆计算的新时代(VC),车辆是一个移动计算平台。然而,汽车系统和多种技术要求的跨歧视复杂性使得对机动车的发展应用具有挑战性。为了简化在SDV上运行的应用程序的开发,我们提出了一个全面的车辆编程接口(VPI)套件。在这项研究中,我们严格探讨了VC领域内的处理开发的细微要求,以我们对开放车辆数据分析平台(OpenVDAP)的建筑错综复杂的分析进行了分析。然后,我们详细介绍了一组全面的标准化VPI套件,涵盖了五个关键类别:硬件,数据,计算,服务和管理,以满足这些不断发展的程序要求。为了验证VPI的设计,我们使用室内自动驾驶汽车Zebra进行实验,并开发OpenVDAP原型系统。通过将其与行业影响的汽车界面进行比较,我们的VPI在编程效率方面表现出显着提高,这标志着SDV应用程序开发领域的重要进步。我们还展示了案例研究并评估其表现。我们的工作强调了VPI可显着提高开发VC应用程序的效率。他们满足了当前和未来的技术要求,并推动软件定义的汽车行业迈向更相互联系和聪明的未来。