XiaoMi-AI文件搜索系统
World File Search System软有界


多授权功能加密与标准假设的有界碰撞∗
多权利功能加密(MA -FE)[Chase,TCC'07; Lewko-Waters,Eurocrypt'11; Brakererski等人,ITCS'17]是对功能加密(FE)的普遍概括,其中心目标是将信任假设从单个中心信任的关键权威转移到一组多个独立和非相互作用的关键机构。在过去的几十年中,我们看到了从各种假设和各种安全性水平的FE支持不同功能类别的新设计和构造方面的巨大进步。不幸的是,在多权设置中尚未复制同样的情况。当前的MA-Fe设计范围是相当有限的,其正面结果仅因(全部或全部)属性功能而闻名,或者需要通用代码混淆的全部功能。Brakerski等人提供的含义可以部分解释MA-FE中的最新技术。(ITCS'17)。表明,即使只有在有限的收集模型中安全的磁盘方案才能安全,即使MA -FE方案才能安全,即使在界限模型中,每个机构最多都会损坏了通用的混淆方案。在这项工作中,我们重新审视了Ma -fe的问题,并表明从Ma -Fe到混淆的现有含义并不紧张。我们提供了新的方法来设计MA -FE,用于简单和最小的加密假设的电路。我们的主要贡献总结为

HELIX 软磁共振
HELIX SFT 质谱仪是专为满足静态真空社区需求而设计的产品系列之一。该产品组合包括 ARGUS VI™ 质谱仪,这是一种高灵敏度、多收集器系统,主要设计为用于氩测年的终极工具。该产品组合中的最终产品是 HELIX MC Plus™ 质谱仪,它被设计为终极高分辨率可变多收集器系统。该仪器能够同时测量氖、氩、氪或氙的任意五种同位素,分辨率达到新的水平。


复发性多软骨炎
摘要 目的 描述了一种新的成人自身炎症综合征,称为 VEXAS(空泡、E1 酶、X 连锁、自身炎症、躯体)。我们旨在比较特发性复发性多软骨炎 (I-RP) 和 VEXAS 复发性多软骨炎 (VEXAS-RP) 的临床特征、实验室特征和结果。方法 将法国回顾性多中心 RP 队列中的患者分为两组:VEXAS-RP 和 I-RP。结果 与 I-RP 患者(n=40)相比,VEXAS-RP 患者(n=55)为男性(96% vs 30%,p<0.001),诊断年龄更大(66 岁 vs 44 岁,p<0.001)。他们的发烧患病率 (60% vs 10%, p<0.001)、皮肤病变 (82% vs 20%, p<0.001)、眼部受累 (57% vs 28%, p=0.01)、肺浸润 (46% vs 0%, p<0.001)、心脏受累 (11% vs 0%, p=0.0336) 和 C 反应蛋白水平中位数 (64 mg/L vs 10 mg/L, p<0.001) 都高于 I-RP 组。75% 的 VEXAS-RP 患者患有骨髓增生异常综合征 (MDS),而 I-RP 组无此情况。两组的糖皮质激素使用情况和类固醇减量剂数量相似,但 VEXAS-RP 患者的难治性疾病更常见 (27% vs 90% 获得缓解,p<0001)。 VEXAS-RP 与更高的死亡风险相关:在中位随访期 37 个月后,VEXAS-RP 组有 6 名患者(11%)死亡,而在中位随访期 92 个月后,I-RP 组无患者死亡(p<0.05)。结论我们报告了最大的 VEXAS-RP 队列,其特点是男性发病率高、发热、皮肤病变、眼部受累、肺部浸润、心脏受累、高龄和 MDS 相关。
备件目录(硬 & 软...
A:陆军总部,军械分支的伊瓦斯特将军,电气和L \ 4机械工程局局信函编号23.01 .901 .048.06.06.079.01 .22 .01.22 .01.25日期为2025年1月27日(并非全部)。1。请告知孟加拉国军队正在计划重新评估S Door Hard Top Jeep(GP-C)和Truck Wrecker(Light)3吨。ln这方面,您被要求使用Fonryard Technology C*r,R ..以及原始的手册/目录,型号技术规范100%更新了Originei备件目录(硬&软复制)和其他信息。提供了模型shoui,。电气和机电Engir-i,:i,r,。Dhaka Cantonment省,到2025年2月13日,对此办公室有一个暗示。您的ARC ALS ..:要求提供DGDP的入伍以及技术优惠。缺乏任何信息,r,r将取消报价的资格。
用于可重构多模态软机器人的高动态双稳态软执行器
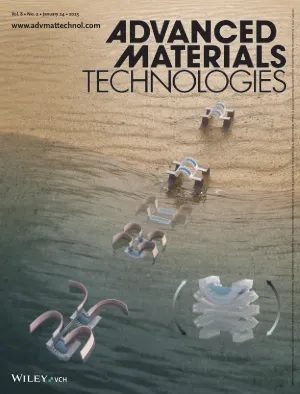
已经开发出能够进行多模式运动的机器,这些机器能够在非结构化环境中机动,用于搜索和救援行动、[2] 监控和防御等应用。 [3] 这种多模态性通常通过 i)身体形状变形、ii)步态改变或 iii)使用不同的驱动或推进机制实现。 一种流行的方法是使用专门用于相应环境中运动的不同推进机制(例如,螺旋桨用于飞行和游泳,轮子用于陆地运动 [4,5] )。 然而,多种推进机制会使设计复杂化,并增加此类系统的重量。 同样,使用能够实现不同步态和运动模式的单一推进机制可以简化设计,但通常会导致在某些环境中的移动性受到更多限制。 [6–8] 一种有前途的替代方案是利用身体的可逆形状变形,这样就可以重新调整一组常见的执行器或机器人肢体,以执行新的地面接触或流体结构相互作用模式(参见参考文献 [9–11] 中的示例)。软机器人特别适合可逆形状变化,因为它们具有机械可变形性和对受控刺激的形态反应。最近,Baines 等人提出了一种形状变形肢体,它可以利用刚度调节在鳍状肢和腿之间变换。[12] 这种肢体被安装在受海龟启发的机器人 [6] 上,以促进两栖运动。Shah 等人提出了一种
针对软错误的架构设计
1 简介 1 1.1 概述 1 1.1.1 软错误的证据 2 1.1.2 软错误的类型 3 1.1.3 减轻软错误影响的经济有效的解决方案 4 1.2 故障 6 1.3 错误 7 1.4 指标 9 1.5 可靠性模型 11 1.5.1 可靠性 12 1.5.2 可用性 13 1.5.3 其他模型 13 1.6 互补金属氧化物半导体技术中的永久性故障 14 1.6.1 金属故障模式 15 1.6.2 栅极氧化物故障模式 17 1.7 CMOS 晶体管中的辐射诱发瞬态故障 20 1.7.1 阿尔法粒子 20 1.7.2 中子 21 1.7.3 阿尔法粒子和中子与硅晶体的相互作用 26 1.8 阿尔法粒子和中子撞击的架构故障模型 30 1.9 静默数据损坏和检测到的不可恢复错误 32 1.9.1 基本定义:SDC 和 DUE 32 1.9.2 SDC 和 DUE 预算 34