XiaoMi-AI文件搜索系统
World File Search System软波

利用脑电信号进行语音回忆中的单词识别
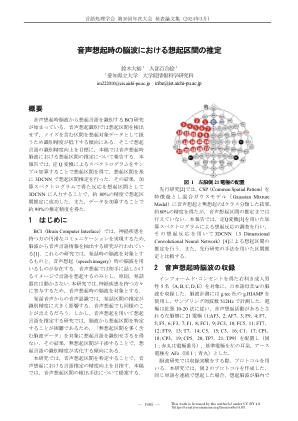
㉳⬻Ἴ䛿Ⓨヰ⬻Ἴ䛸䛿␗䛺䜚䠈ṇ☜䛺㉳้䛜 ᫂░䛷䛒䜛䛸䛔䛖ၥ㢟䛜䛒䜛䠊䛭䛣䛷䠈ᅗ 2 䛾㘓䝥䝻䝖䝁䝹䛻䛚 䛔䛶䠈⿕㦂⪅䛿⣧㡢䛜㬆䜚⤊䜟䛳䛯┤ᚋ䛻㉳䜢㛤ጞ䛧䛶䛔䜛 䛸௬ᐃ䛧䠈 1 ༢ㄒ䛾㉳㛫䜢 400ms 䛸⪃䛘䠈 0-400ms( ⣧㡢┤ ᚋ :0ms) 䜢ゎᯒ༊㛫䛸䛩䜛䠊 3.2 ⠇䛷ㄝ᫂䛧䛯 6 䛴䛾≉ᚩ㔞䛩䜉 䛶䜢⏝䛔䛯䛯䜑䠈ධຊḟඖᩘ䛿䠈 ( ⥺䝇䝨䜽䝖䝹௨እ䛾 5 䛴䛾≉ ᚩ㔞㽢 21ch 䠇⥺䝇䝨䜽䝖䝹 25 ḟඖ ) 㽢 2( ᖹᆒ䛸ᶆ‽೫ᕪ ) 䛾 260 ḟඖ䛷䛒䜛䠊 10 ྡ䛾⿕㦂⪅䛾ᖹᆒṇゎ⋡䜢ᅗ 6 䛾䛂 0- 400ms ༊㛫䛃䛻♧䛩䠊ᅗ 6 䜘䜚䠈ṇゎ⋡䛿 20% 䜋䛹䛷䛒䜚䠈ㄆ㆑ 䛷䛝䛶䛔䛺䛔䛣䛸䛜䜟䛛䜛䠊 ṇゎ⋡䛜ప䛔ཎᅉ䛾୍䛴䛸䛧䛶䠈ṇ☜䛺㉳༊㛫䛜≉ᐃ䛷 䛝䛶䛔䛺䛔Ⅼ䛜ᣲ䛢䜙䜛䠊䛭䛣䛷䠈㉳⬻Ἴ䛸ྠ䛨䝥䝻䝖䝁䝹 䛷㘓䛧䛯Ⓨヰ⬻Ἴ䛻╔┠䛧䛯䠊ྠ䛨䝥䝻䝖䝁䝹䛷㘓䛧䛶 䛔䜛䛣䛸䛛䜙䠈Ⓨヰ䛸㉳䛾㛤ጞ้䜔⥅⥆㛫䛿ᴫ䛽୍⮴䛩 䜛䛸௬ᐃ䛧䛯䠊䛭䛧䛶Ⓨヰ㛫䜢䜒䛸䛻ゎᯒ༊㛫䜢Ỵᐃ䛩䜜䜀䠈 ㉳༊㛫䛷䛾ㄆ㆑ᐇ㦂䛜⾜䛺䛘䜛䛿䛪䛷䛒䜛䠊௨ୖ䛾䛣䛸䛛䜙䠈 Ⓨヰ⬻Ἴ䜢㘓䛧䛯㝿䛻㘓㡢䛧䛯㡢ኌ䝕䞊䝍䛛䜙ྛ⿕㦂⪅ 䛾ᩘᏐ䛤䛸䛾Ⓨヰ㛫䜢⟬ฟ䛩䜛䠊 ⿕㦂⪅䛤䛸䛾Ⓨヰ㛤ጞ㛫䛾ᖹᆒ䜢ぢ䛶䜏䜛䛸䠈䛹䛾⿕㦂⪅ 䜒 250ms ௨㝆䛻Ⓨヰ䜢㛤ጞ䛧䛶䛚䜚䠈⣧㡢䛾㬆䜚⤊䜟䜚┤ᚋ䛻 Ⓨヰ䜢㛤ጞ䛧䛶䛔䜛⿕㦂⪅䛿䛔䛺䛛䛳䛯䠊䜎䛯䠈⿕㦂⪅䛻䜘䛳 䛶㛤ጞ㛫䛿␗䛺䛳䛶䛔䛯䠊䛥䜙䛻䠈ྠ䛨ᩘᏐ䛻䛚䛡䜛⿕㦂⪅ 䛤䛸䛾Ⓨヰ⥅⥆㛫䛾ᖹᆒ䜢ぢ䛶䜏䜛䛸䠈䛣䛱䜙䜒⿕㦂⪅䛻䜘䛳 䛶␗䛺䜛䛣䛸䛜䜟䛛䛳䛯䠊䛣䛾⤖ᯝ䛛䜙䠈ゎᯒ༊㛫䛸䛧䛶䛔䛯 0- 400ms 䛿ᐇ㝿䛾㉳༊㛫䛸䛝䛟␗䛺䛳䛶䛔䜛ྍ⬟ᛶ䛜㧗䛔䠊 䜘䛳䛶䠈㉳䛾ゎᯒ༊㛫䜢ྛ⿕㦂⪅䛾༢ㄒ䛤䛸䛾Ⓨヰ㛤ጞ 㛫䛸⤊㛫䜢䜒䛸䛻ኚ᭦䛧䠈ᨵ䜑䛶㡢ኌ㉳༢ㄒㄆ㆑ᐇ㦂 䜢⾜䛖䠊
用于可重构多模态软机器人的高动态双稳态软执行器
已经开发出能够进行多模式运动的机器,这些机器能够在非结构化环境中机动,用于搜索和救援行动、[2] 监控和防御等应用。 [3] 这种多模态性通常通过 i)身体形状变形、ii)步态改变或 iii)使用不同的驱动或推进机制实现。 一种流行的方法是使用专门用于相应环境中运动的不同推进机制(例如,螺旋桨用于飞行和游泳,轮子用于陆地运动 [4,5] )。 然而,多种推进机制会使设计复杂化,并增加此类系统的重量。 同样,使用能够实现不同步态和运动模式的单一推进机制可以简化设计,但通常会导致在某些环境中的移动性受到更多限制。 [6–8] 一种有前途的替代方案是利用身体的可逆形状变形,这样就可以重新调整一组常见的执行器或机器人肢体,以执行新的地面接触或流体结构相互作用模式(参见参考文献 [9–11] 中的示例)。软机器人特别适合可逆形状变化,因为它们具有机械可变形性和对受控刺激的形态反应。最近,Baines 等人提出了一种形状变形肢体,它可以利用刚度调节在鳍状肢和腿之间变换。[12] 这种肢体被安装在受海龟启发的机器人 [6] 上,以促进两栖运动。Shah 等人提出了一种
语音回忆过程中脑电图回忆间隔的估计
图4显示了使用20倍交叉验证估计每个受试者的回忆间隔的结果。在图 4 中,横轴是时间,纵轴是来自 5 个受试者的 200 个样本(总共 1000 个样本)的准确率。红框内是语音回忆部分。前文研究 [2] 中的方法(图 4 中的蓝线)的准确率在语音回忆片段之间下降到 0.2,而本文提出的方法(图 4 中的橙线)则达到了 0.8 的稳定准确率。 从这些结果可以看出,可以说所提出的方法对于估计回忆间隔是有效的。然而,当我们观察所提出的方法在语音回忆部分之外的准确度时,我们发现与以前的研究相比,该方法将语音回忆部分之外的部分估计为回忆率的情况更为常见。这被认为是由于大脑中噪音的影响。因此,我们旨在通过将增加的 10 个样本应用于所提出的方法来减少这种噪音。结果就是图4中的绿线。在保持回忆部分的准确度的同时,非回忆部分的准确度得到了提高。基于这些结果,我们研究了所提出方法的最佳添加次数。结果如图5所示。图 5 显示了所有受试者对每个加法数字的准确率。蓝线表示整个时间内的平均准确率,橙线表示回忆期间的最大准确率。横轴是添加的样本数量,纵轴是准确率。通过添加 sigma,回忆部分的准确率得到了提高,达到了约 90%。另外,10 次添加等于 1 个样本。
用于 MRI 的 Rician 噪声预测和消除模型...
图 1:MRI 图像 a) 干净的 MRI 图像 b) 莱斯噪声图像 小波是一种同时表示频率和时间信息的小波。傅里叶变换使用平滑的无限正弦波来分解信号。与傅里叶变换不同,小波使用不规则的波函数来分割信号,这使得小波成为分析不连续信号的理想工具 [5]。小波变换根据其收缩规则通过硬阈值和软阈值来执行。在硬阈值处理中,带噪小波的系数设置为零。但在软阈值处理中,带噪小波系数根据其子带系数进行调整 [6]。与传统傅里叶变换相比,小波变换在表达具有尖锐峰值和不连续性的函数以及重构和解构信号方面具有一定的优势。图
波洛莱
2015 年,Bolloré 集团在联合国气候变化大会 (COP21) 期间在香榭丽舍大街启动了第一条 Bluetram 线路,继续部署其清洁和可持续的出行解决方案。作为官方合作伙伴,集团还向联合国成员国提供了 Bluebus 和 Bluecar ® 车队。集团继续开发电动汽车共享解决方案,在印第安纳波利斯投入使用 Blueindy,意大利的 Bluetorino 也将很快加入其中。新蓝区 (Bluezones) 在非洲的贝宁、刚果和几内亚兴起,它们是为当地居民提供电力、饮用水、互联网和其他多种服务(如年轻企业家孵化器)的生活空间。所有这些用于个人或集体出行以及智能使用和储存电力的创新都是对可持续发展和能源储存问题的回答,这些问题已成为公民、城市和政府面临的主要问题。集团历史悠久的业务线——运输和物流,也预见到了其活动中不可避免的技术趋势以及气候变化的影响。因此,我们在勒阿弗尔的物流枢纽项目在“COP21 解决方案”博览会上被评为运输和物流领域的“创新和有效”解决方案。今年的第二项重要活动是组织运输和物流活动。在日益增长的需求中
波洛莱
集团各部门均在考虑各业务单位具体情况的同时,运用这一战略愿景,确保行动部署一致、可持续。集团业务领域的多样性反映在其企业社会责任政策中:> 由于运输和物流部门的特殊性质和地理位置,该部门制定了特别严格的人力资源和健康安全政策。员工是该业务领域成功的关键;> 通过 Vivendi,通讯部门的战略以人权为基础,特别是促进文化多样性、知识共享、支持年轻人和保护个人数据;> 电力存储和解决方案部门的发展基于一项投资和创新政策,该政策致力于对抗污染和支持能源转型。集团的优先事项(所有子公司都一样)包括降低与商业道德相关的风险、确保遵守人权、实施支持与员工建立可持续关系的就业政策、投资开发创新和环保的产品和服务,以及成为其所在地区经济和社会发展的重要合作伙伴。—
针对软错误的架构设计
1 简介 1 1.1 概述 1 1.1.1 软错误的证据 2 1.1.2 软错误的类型 3 1.1.3 减轻软错误影响的经济有效的解决方案 4 1.2 故障 6 1.3 错误 7 1.4 指标 9 1.5 可靠性模型 11 1.5.1 可靠性 12 1.5.2 可用性 13 1.5.3 其他模型 13 1.6 互补金属氧化物半导体技术中的永久性故障 14 1.6.1 金属故障模式 15 1.6.2 栅极氧化物故障模式 17 1.7 CMOS 晶体管中的辐射诱发瞬态故障 20 1.7.1 阿尔法粒子 20 1.7.2 中子 21 1.7.3 阿尔法粒子和中子与硅晶体的相互作用 26 1.8 阿尔法粒子和中子撞击的架构故障模型 30 1.9 静默数据损坏和检测到的不可恢复错误 32 1.9.1 基本定义:SDC 和 DUE 32 1.9.2 SDC 和 DUE 预算 34
软机器人 - IRIS Re.Public@polimi.it
软机器人技术是机器人技术的一个特定子领域,涉及使用与生物体中类似的高柔顺性材料构建机器人。软机器人技术很大程度上借鉴了生物体移动和适应周围环境的方式。与用刚性材料制成的机器人相比,软机器人可以提高完成任务的灵活性和适应性,并在与人类一起工作时提高安全性。这些特性使其在医学和制造业领域具有潜在的用途。为了了解软机器人技术在研究中的普遍性,截至 2021 年 4 月,在 Web of Science 数据库中对关键词“软机器人”进行简单搜索,结果超过 6.6k 个条目,自 2010 年代初开始激增,并且仍然受到越来越多的关注(图 1)。本书的目的是全面概述软机器人技术的广泛领域以及化学工程如何参与其中。读者将了解软机器人的基础知识,并了解软机器人在不同工业和研究领域最突出的应用。重要的是,本书还将强调在大型产品中实施软机器人所面临的挑战和问题。全书分为七章。第一章讨论软机器人的主要原理,特别是软微机器人。Bernasconi 博士(第 1 章)介绍了近年来实施的新功能和驱动策略。本章介绍了使用软物质制造的微型机器人的材料、制造技术、驱动策略和应用,重点关注一些特殊类型的材料,如生物实体和硬软混合物。Costa Angeli 博士(第 2 章)概述了可用于软机器人的打印技术和可打印材料。本文还重点介绍了这些技术在工业中的应用所需要解决的主要挑战。 Sacchetti 教授(第 3 章)进一步阐述了该领域中金属有机骨架 (MOF)。金属中心和有机骨架之间的配位产生了复杂的组装体,这些组装体可以从一维结构发展为配位聚合物。本章将简要说明 MOF 在化学物质传感中的应用。MOF 与