XiaoMi-AI文件搜索系统
World File Search System达芬奇
scopus.xlsx 的期刊列表 - EPN
16400154734 A + U-建筑和城市规划 03899160 5700161051 A Contrario。社会科学跨学科杂志 16607880 19600162043 A.M.A.美国儿童疾病杂志 00968994 19400157806 A.M.A.皮肤病学档案 00965359 19600162081 A.M.A.皮肤病学和梅毒学档案 00965979 19400157807 A.M.A.工业卫生档案 05673933 19600162082 A.M.A.工业卫生和职业医学档案 00966703 19400157808 A.M.A.内科医学档案 08882479 19400158171 A.M.A.神经病学档案 03758540 19400157809 A.M.A.神经病学和精神病学档案 00966886 19400157810 A.M.A.眼科档案 00966339 19400157811 A.M.A.耳鼻喉科档案 00966894 19400157812 A.M.A.病理学档案 00966711 19400157813 A.M.A.外科档案 00966908 5800207606 AAA,来自英国和美国的工作者 01715410 28033 AAC:辅助和替代性交流 07434618 50013 AACE 国际。年度会议记录 15287106 19300156808 AACL Bioflux 18448143 4700152443 AACN 高级重症监护 15597768 26408 AACN 临床问题 10790713 51879 AACN 重症监护临床问题 10467467 26729 AANA 期刊 00946354 66438 AANT 期刊/美国肾脏病护士和技术人员协会 07441479 5100155055 AAO 期刊 27096 AAOHN 期刊 08910162 30787 AAPG 公报 01491423 21100202941 AAPG 国际会议:追随达芬奇的脚步探索未来能源:创新

通过激光加工实现的金刚石量子技术
1 意大利国家研究委员会光子学和纳米技术研究所 (IFN-CNR) 和米兰理工大学物理系,意大利米兰 20133 列奥纳多达芬奇广场 32 号 2 加拿大阿尔伯塔省卡尔加里大学量子科学与技术研究所,加拿大阿尔伯塔省卡尔加里 T2N 1N4 3 卡迪夫大学物理与天文学院,英国卡迪夫 CF24 3AA 4 卡迪夫大学工程学院,英国卡迪夫 CF24 3AA 5 马德里康普顿斯大学材料物理系,西班牙马德里大学城 28040 6 东京大学工程学院机械工程系,日本东京 113-8656 7 都灵大学物理系和“纳米结构界面和表面”跨系中心,I-10125意大利都灵 8 国家研究委员会光子学与纳米技术研究所(CNR-IFN)、伊苏布里亚大学科学与高科技系,Via Valleggio 11,22100 科莫,意大利 9 CNR 光子学与纳米技术研究所,L-NESS,Via Anzani 42,22100 科莫,意大利 10 意大利理工学院,可持续未来技术中心,via Livorno 60,10144 都灵,意大利 11 都灵大学,分子生物学中心,via Nizza 52,10126 都灵,意大利 12 乌尔姆大学量子光学研究所,D-89081 乌尔姆,德国 13 乌尔姆大学综合量子科学与技术中心(IQst),D-89081 乌尔姆,德国
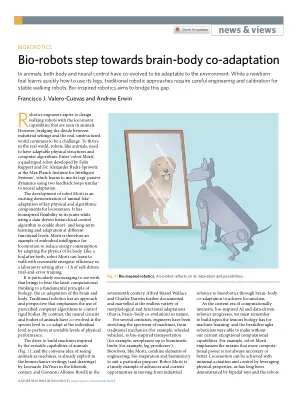
生物机器人迈向大脑与身体共同适应
机器人工程师希望设计出具有动物运动能力的步行机器人。然而,弥合工业环境与真实的非结构化世界之间的鸿沟仍然是一个挑战。要在现实世界中茁壮成长,机器人和动物一样,需要具有适应性强的物理结构和计算机算法。“机器人 Morti”是一款四足机器人,由马克斯·普朗克智能系统研究所的 Felix Ruppert 和 Alexander Badri-Spröwitz 博士开发 1 ,它学会使用两个类似于神经适应的反馈回路来使用腿部的被动动力学。机器人 Morti 的开发是一个令人兴奋的演示,展示了运动关键物理和算法组件的“类似动物”的适应性。它的关节具有生物启发的灵活性,同时使用数据驱动的分层控制算法来实现不同功能级别的短期和长期学习和适应。因此,Morti 是运动体现智能的一个例子,它通过调整身体的物理特性来减少能耗。就像刚出生的小马驹一样,机器人 Morti 经过约 1 小时的自我驱动试错训练后,可以在实验室环境中以合理的能量效率学会走路。看到最新的计算思维与生物学的基本原理(大脑和身体的共同适应)相结合的工作尤其令人鼓舞。传统机器人技术的方法和观点强调使用规定的计算机算法来控制刚体。相比之下,动物的神经回路和身体在物种层面上共同进化,在个体层面上共同适应,以达到令人羡慕的身体表现水平。受动物多才多艺的启发而制造机器的动力(图 1),以及将动物视为机器的相反想法,在 15 世纪列奥纳多·达芬奇和 16 世纪乔瓦尼·阿方索·博雷利的生物力学著作(和绘画)中已经明确表达出来。
卢卡·罗萨法科
• 助理教授(08/B2 结构力学部门非终身研究员初级职位)。研究活动侧重于材料和结构机械行为的建模。参考现有结构,研究对象是基于分布式传感器网络的监控技术,同时利用人工智能方法(神经网络)的最新进展。参考创新材料,研究活动侧重于开发新的数值技术进行设计优化,例如遗传算法和强化学习。从微观到宏观尺度的实验表征和模型验证的创新实验策略完善了活动范围。 • 米兰理工大学博士后研究员。资助:“用于 MEMS 中机械能转换和存储的超材料和超结构”,由米兰理工大学民用和环境工程部颁发,资助编号 198010,日期 2021 年 11 月 17 日,索引号10600。该资助由米兰理工大学和 ST Microelectronics 的 STEAM(先进材料传感器系统)联合研究中心资助。主要课题:强化学习在 MEMS 规模能量收集用分级超材料设计中的应用(2022 年至今)。• 结构和计算力学课程助教。硕士论文联合导师(2018 年至今)。• 与 Eurosilos Sirp srl 合作。主要课题:玻璃增强聚酯外壳的结构设计。研发合同:“GRP 筒仓的分析和优化”。合同负责人:R. Ardito 教授(2023 年)。• 与 Socotec 监测(法国)合作。主要课题:使用实验记录校准烟囱的结构模型的开发(2022 年)。• 米兰理工大学结构、地震和岩土工程博士候选人。主要主题:结合物理和基于数据的方法开发结构健康监测计算方法(2018-2022)。 • 在 Studio di Ingegneria Amigoni、Calolziocorte (LC) 实习。主要主题:监测列奥纳多达芬奇的《最后的晚餐》的结构稳定性,米兰圣玛利亚感恩教堂(2018 年)。海外经历:
奖项
亚历克斯·罗兰(Alex Roland)博士因其对技术历史的学术贡献,对射击的服务,他作为教育家的奉献精神和影响力以及他作为军事和航空航天历史上的公开专家的角色而获得了2023年莱昂纳多·达芬奇奖章。罗兰的历史问题最初是从他在越南时代担任军官的经验而增长的。从美国毕业后海军学院,罗兰(Roland)在美国海军陆战队任职,这是越南前线外科医生的助手。他于1970年获得了夏威夷大学的硕士学位,此后他在杜克大学(Duke University)的博士课程中就读。在NASA历史办公室担任工作人员几年后,罗兰(Roland)加入了杜克大学历史系教职员工。他还在美国陆军战争学院和美国任命海军学院。首先是在Sail时代发表水下战争(1978)罗兰的许多书籍和文章,这表明了他广泛的兴趣。他的作品涵盖了几个世纪,大陆,海洋,甚至是外太空的到达,以了解理解技术与社会之间的相互关系。他的学术书籍包括模型研究:国家航空咨询委员会,1915- 1958年(1985年),战略计算:DARPA和《机器智能的追求》,1983-1993(2002年,菲利普·西曼(Phillip Shiman))。在执行理事会任期后,亚历克斯(Alex)担任射击秘书四年,然后在1995年担任总统。罗兰在伦敦的总统讲话:“克兰兹伯格锻炼什么?罗兰在伦敦的总统讲话:“克兰兹伯格锻炼什么?他的最新出版物《权力的三角洲:军事工业综合体》(2021年)被奖品获奖的历史学家沃尔特·A·麦克杜格尔(Walter A.亚历克斯·罗兰(Alex Roland)在智力和组织上为射门做出了数十年的贡献。他的总统职位是一个伟大的活动时期,包括变更T&C的编辑以及筹款领域的显着成就,包括获得多个奖金和奖项的启用。还是,技术历史重要?”给我们留下了这样的建议:“我们必须退出我们自己的共同理解,即技术很重要,并获得了奖学金来说服

语言研究理论与实践目录
英汉词缀来源与词形的哲学关系 谭正华 郭燕华 疫情期间英语语言元素的传播 Merey Balabekova、Nadezhda Khan、Yeldos Tuite、Sayan Kenzhegaliev、Zamzagul Zuyntayeva、Bektursun Kaliev 和 Zhandos Smagulov 描写 Khushwant Singh 短篇小说《Kusum》和《The Great Difference》中的怪诞人物和场景 P. Gopikrishna 和 J. Anil Premraj 古爪哇语语法主语的结构和作用 Ni Ketut Ratna Erawati 和 I Ketut Ngurah Sulibra 推进动机与能力研究与教师实践和成功的二语学习成果的关系 Sami Ali Nasr Al-wossabi 诗人的心理状态及其与 Zahaafaat 的关系和 Ilal:以 Abi Al-Shis Al- Khuza'i 的诗为范本 Ali M. Al Tawalbeh 《白鲸》的圣经原型研究 Xiaoni Ye 文学翻译是艺术接受的主要工具之一:以哈萨克斯坦和俄罗斯文学互动为例 Kadisha Nurgali、Viktoriya Siryachenko、Liliya Mukazhanova、Marzhan Zhapanova 和 Rabiga Nurgali 通过导演话语和作者理论重新思考电影改编:解读丹·布朗的《达芬奇密码》 M Caleb Theodar 和 Saranya P 印尼语寒暄功能的三元性 R. Kunjana Rahardi 第二语言词汇学习中的语料库和协和 Morad Alsahafi 阿卜杜拉二世国王关于 COVID-19 疫情影响的两次演讲中的说服策略 Amal Samir AbuAlhuda 和 Sabri Alshboul An约翰·奥斯本的《道林·格雷的画像》中自恋表达的编排——一种道德娱乐:对科胡特自我心理学的反思 精神分析 M. Ramesh Kumar 和 G. Christopher 探索亚萨维的《Divan-i Hikmet》英文版中的主题和情感:一种文本挖掘方法 Zhazira Azamatovna Suleimenova、Rysgul Abilkhamitkyzy、Bakyt Amirkhankyzy Yskak 和 Bolat Saginbekuly Korganbekov 解读学生和教师对英语作为教学媒介的看法:以萨塔姆·本·阿卜杜勒阿齐兹王子大学为例的研究 Mohammed Aldawsari

月球水提取和净化技术验证
摘要 可持续太空探索需要改进原位资源利用 (ISRU) 技术,特别是利用当地资源生产机器人和人类探索所必需的产品。利用当地资源(如水)的能力不仅可以解决从地球运输物资的后勤挑战,还可以显著降低与太空任务相关的成本。水被列奥纳多达芬奇视为自然的驱动力,是太空探索的关键资源。作为宇航员的消耗品、辐射屏蔽以及电解成氢和氧(一种高效的火箭推进剂组合)描述了它的多种应用。然而,原位水提取在技术上仍然具有挑战性,需要进一步开发。LUWEX 项目通过开发和验证完整的原位水工艺链(包括提取、净化和质量监测)来应对这一挑战。它设想利用月球风化层中的水来推进并供宇航员饮用,从而实现可持续的太空探索。该综合测试装置使用热真空室内的冰冷月球尘埃模拟物模拟月球条件,旨在将整个流程链的技术就绪水平 (TRL) 从 2 级和 3 级提升到 4 级(即功能验证),一些子系统甚至可达到 TRL 5(即在相关环境中进行验证)。本文讨论了该项目的目标和相应的方法,强调了先进的水提取、捕获、净化和质量监测技术的开发和验证。通过这些技术,LUWEX 寻求为未来由欧洲主导的太空探索任务贡献创新的月球水提取和净化系统。本文概述了系统设计,并详细介绍了项目的技术发展路线图,阐述了 LUWEX 对未来探索任务的适应性,强调了其预计的潜力和长期目标,并概述了潜在的地面应用策略。转向可持续实践增强了我们执行长期任务的能力,最大限度地减少了对地球资源的依赖,从而提高了太空探索的可行性和可负担性。关键词:原位资源利用 (ISRU)、月球水提取、可持续技术、月球风化层、水净化 1. 简介 1.1 背景和动机 长期载人月球探索需要原位资源利用 (ISRU),以通过最大限度地减少质量、成本和风险来增强未来任务的能力 [1] ISRU 技术旨在利用本地资源为机器人和人类任务生产必需产品,

人工智能发明与专利披露
* 加州西部法学院副教授;加州大学圣地亚哥分校客座副教授;印第安纳大学(布卢明顿)奥斯特罗姆访问学者;内布拉斯加大学(林肯)访问学者:内布拉斯加州治理与技术中心;乔治梅森大学安东宁斯卡利亚法学院托马斯爱迪生创新研究员和列奥纳多达芬奇研究员;加州大学洛杉矶分校法学院访问学者;美国注册专利律师;西北大学普利兹克法学院法学博士;西北大学凯洛格管理学院工商管理硕士;休斯顿大学法学院法学硕士;斯坦福大学商学院研究生创业证书;斯坦福大学工程学院机械工程硕士;德克萨斯大学奥斯汀分校科克雷尔工程学院机械工程学士。非常感谢 Michael Risch、Ted Sichelman、Brenda Simon、Thomas D. Barton、Robert A. Bohrer、Shawn Miller、Lisa Ramsey、Anjanette Raymond、Daniel R. Cahoy、Sonia Katyal、Tejas Narechania、Jonathan Barnett、Eric Claeys、John Duffy、Sean O'Connor、Ashish Bharadwaj、Loletta Dardin、Charles Delmotte、H. Tomás Gómez-Arostegui、Taorui Guan、Devlin Hartline、Christa Laser、Daryl Lim、Kevin Madigan、Talha Syed、James Stern、Seth C. Oranburg、Agnieszka McPeak、Gregory Day、Nicole Iannarone、Emily Loza de Siles、Eric C. Chaffee、Robert F. Kravetz、Ashley London、Aman Gebru、Elizabeth I. Winston、A. Michael Froomkin、Mason Marks、Larry DiMatteo、Robert W. Emerson、Robert E. Thomas、Colleen M. Baker、Lawrence Trautman、George Cameron、David Orozco、Thomas Freeman、Christopher Guzelian、Daniel Herron、Michelle Romero、Tyler Smith、Brian Haney、Jihwang Yeo、Sikander Khan、Erica Pascal、Ryan Hsu、Kevin R. Tamm 和 Daniel R. Peterson。感谢以下论坛展示本文并感谢参与者的真知灼见:佛罗里达大学沃灵顿商学院 2020 年 Huber Hurst 研究研讨会、杜肯大学法学院初级 #FutureLaw 研讨会 4.0、印第安纳大学(布卢明顿)奥斯特罗姆研讨会系列座谈会、乔治华盛顿大学法学院初级知识产权学者协会 (JIPSA)、迈阿密大学法学院 2019 年 We Robot 大会、堪萨斯大学法学院 PatCon 9(年度专利会议)以及圣地亚哥大学法学院第 9 届年度专利法会议。感谢商业法律研究学院 (ALSB) 跨学科部门在 2020 年 ALSB 年会上将本文评为首届“最佳论文奖”,并感谢 ALSB 成员的真知灼见。

人工智能发明与专利披露
* 加州西部法学院副教授;加州大学圣地亚哥分校客座副教授;印第安纳大学(布卢明顿)奥斯特罗姆访问学者;内布拉斯加大学(林肯)访问学者:内布拉斯加州治理与技术中心;乔治梅森大学安东宁斯卡利亚法学院托马斯爱迪生创新研究员和列奥纳多达芬奇研究员;加州大学洛杉矶分校法学院访问学者;美国注册专利律师;西北大学普利兹克法学院法学博士;西北大学凯洛格管理学院工商管理硕士;休斯顿大学法学院法学硕士;斯坦福大学商学院研究生创业证书;斯坦福大学工程学院机械工程硕士;德克萨斯大学奥斯汀分校科克雷尔工程学院机械工程学士。非常感谢 Michael Risch、Ted Sichelman、Brenda Simon、Thomas D. Barton、Robert A. Bohrer、Shawn Miller、Lisa Ramsey、Anjanette Raymond、Daniel R. Cahoy、Sonia Katyal、Tejas Narechania、Jonathan Barnett、Eric Claeys、John Duffy、Sean O'Connor、Ashish Bharadwaj、Loletta Dardin、Charles Delmotte、H. Tomás Gómez-Arostegui、Taorui Guan、Devlin Hartline、Christa Laser、Daryl Lim、Kevin Madigan、Talha Syed、James Stern、Seth C. Oranburg、Agnieszka McPeak、Gregory Day、Nicole Iannarone、Emily Loza de Siles、Eric C. Chaffee、Robert F. Kravetz、Ashley London、Aman Gebru、Elizabeth I. Winston、A. Michael Froomkin、Mason Marks、Larry DiMatteo、Robert W. Emerson、Robert E. Thomas、Colleen M. Baker、Lawrence Trautman、George Cameron、David Orozco、Thomas Freeman、Christopher Guzelian、Daniel Herron、Michelle Romero、Tyler Smith、Brian Haney、Jihwang Yeo、Sikander Khan、Erica Pascal、Ryan Hsu、Kevin R. Tamm 和 Daniel R. Peterson。感谢以下论坛展示本文并感谢参与者的真知灼见:佛罗里达大学沃灵顿商学院 2020 年 Huber Hurst 研究研讨会、杜肯大学法学院初级 #FutureLaw 研讨会 4.0、印第安纳大学(布卢明顿)奥斯特罗姆研讨会系列座谈会、乔治华盛顿大学法学院初级知识产权学者协会 (JIPSA)、迈阿密大学法学院 2019 年 We Robot 大会、堪萨斯大学法学院 PatCon 9(年度专利会议)以及圣地亚哥大学法学院第 9 届年度专利法会议。感谢商业法律研究学院 (ALSB) 跨学科部门在 2020 年 ALSB 年会上将本文评为首届“最佳论文奖”,并感谢 ALSB 成员的真知灼见。
哈姆林医疗机器人研讨会 - mediaTUM
序言 第六届 Hamlyn 医疗机器人研讨会于 2013 年 6 月 22-25 日在英国伦敦 Hamlyn 机器人手术中心和皇家工程院举行。今年研讨会的主题是“协作控制和感知对接”,邀请了协作机器人、导航和图像引导领域的顶尖科学家和工程师作为特邀演讲嘉宾。受邀演讲嘉宾包括 Robert Howe 教授和 Reiza Rayman 博士,他们都对该领域的前沿发展提供了深刻见解。主题演讲由 Gary Guthart 发表,他概述了“达芬奇系统 14 年:临床概述、经济和机遇”。今年的 Karl Storz-Harold Hopkins 年度讲座由 Ferdinand Köckerling 教授主讲,主题为“减肥手术中的机器人技术”。共有来自 18 个国家的 102 篇论文提交,经过系统的同行评审,62 篇论文被选中在研讨会上发表。所涵盖的主题包括培训和临床结果、机器人手术中的图像引导、平台设计、感知对接、术中组织跟踪和表征以及新的临床方法和试点研究。哈姆林研讨会源自最初的帝国理工学院由哈姆林机器人手术中心资助的跨学院医疗机器人研讨会。我们很高兴它现在已成为临床医生、工程师和研究人员交流想法和探索医疗技术新挑战和新机遇的年度国际论坛。我们欣慰地看到,今年资深学者和年轻研究员继续合作,在研讨会前后组织了一系列研讨会,主题包括辅助机器人、柔性通道手术、监管事务和临床试验与结果。这些研讨会为集中讨论医疗机器人的具体研究和临床主题提供了一个论坛,也为学术交流提供了一个非正式的环境。许多这样的研讨会促进了参与者之间的进一步互动和联合研究出版物。我们要感谢国际和地方计划委员会、研讨会组织委员会和地方组织委员会,感谢他们付出宝贵的时间,确保及时审查所有提交的论文,并帮助提供出色的研讨会计划。如果没有一支敬业团队的承诺和辛勤工作,这次会议就不可能实现。我们特别感谢 Karen Kerr、Su-Lin Lee、Hedyeh Rafii-Tari、George Mylonas、Daniel Elson、Sejal Jiwan、Ruzanna Gulakyan 和 Raphaele Raupp 在管理研讨会组织的各个方面所付出的不懈努力。最后,我们还要感谢所有研讨会组织者,他们使研讨会前后的所有工作都取得了巨大的成功。网上有相册 (http://www.hamlyn-robotics.org/),里面记录了整个活动的难忘经历。我们想借此机会特别感谢哈姆林夫人。当然,如果没有海伦·哈姆林信托基金和哈姆林夫人本人的慷慨慈善支持,这一切都不可能实现。我们非常高兴地欢迎研讨会的与会者来到伦敦。2013 年 6 月,伦敦 杨光忠,FREng Ara Darzi,FRS