XiaoMi-AI文件搜索系统
World File Search System运动参数

项目标题:饮食硝酸盐和体育锻炼以预防糖尿病的心血管疾病
背景:体育锻炼和饮食改善是代谢综合征和糖尿病患者的至关重要的非药理策略。这些生活方式的变化减少了慢性氧化应激,并增加一氧化氮(NO)生物利用度。我们的研究集中于无机硝酸盐,在绿叶蔬菜和甜菜根中以高水平发现,它们转化为生物活性号。研究表明,硝酸盐对心血管功能产生积极影响,降低血压,改善血管功能以及增强运动参数(例如线粒体效率和氧利用)。我们假设饮食中的硝酸盐与体育锻炼相结合将为T2D患者的心血管保护提供,患有CVD的高风险。该项目涉及一项临床试验,以研究T2D患者体育锻炼和饮食硝酸盐对心血管健康的综合作用。

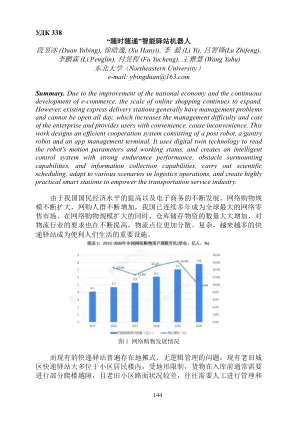
段昱冰(Duan Yubing), 徐晗逸, (Xu Hanyi), 李毅(Li Yi), ...
摘要。由于国民经济的改善和电子商务的持续发展,在线购物的规模不断扩大。但是,现有的快速交付站通常存在管理问题,并且不能整天开放,这增加了企业的管理困难和成本,并为用户提供便利。引起不便。这项工作设计了一个有效的合作系统,该系统由邮政机器人,龙门机器人和应用程序管理终端组成。它使用数字双技术来读取机器人的运动参数和工作状态,并创建一个具有良好耐力性能的智能控制系统,障碍超越能力和信息收集能力,执行科学调度,适应物流操作中的各种方案,并创建高度实用的智能站,以增强运输服务行业的能力。

使用 FMRI 图像诊断诵读困难症
功能预处理:在 fMRI 数据分析中,每次运行 BOLD 时,都会执行一系列预处理步骤。这包括创建参考体积和去颅骨版本以与 T1 加权参考对齐、估计头部运动参数以及应用时空滤波以增强神经活动模式并抑制噪音。根据获取体积内切片的时间差异调整切片时间校正,并转换为标准模板空间,确保一致的空间对齐。进一步的步骤包括生成混杂时间序列、计算生理回归量、使用网格重采样进行空间对齐以及高斯平滑以增强图像。这些程序共同准备了 fMRI 数据以供后续分析,确保对大脑活动模式的解释准确可靠。

联合国人工智能 (AI) 活动 - ITU
作为 IDC 执行的自动数据处理的一部分,对来自地震站的信号进行分类,以根据自动测量的特征(幅度、频率内容、粒子运动参数等)确定其地震相位。在处理来自辅助地震站的数据时,结合使用人工神经网络(ANN)和贝叶斯分类器,自动将 9 种可能的相位类型之一分配给信号。ANN 和贝叶斯分类器在由人工分析人员审查和纠正的自动信号上进行训练。该组件已投入运营多年。正在进行的活动一方面与对每个站点的现有 ANN 进行重新训练(调整)有关,另一方面与通过将当前的 ANN 和贝叶斯分类器组合替换为一个(更深的)ANN 来提高自动分类器的性能有关。我们还在研究在分类过程中使用其他信息(例如原始波形数据)是否可以进一步提高性能。

粘性耗散对 MHD 达西-福希海默纳米液体流动的影响(包括旋转微生物通过非线性延伸表面)
摘要。在当前的研究中,我们研究了含有运动微生物的 Darcy-Forchheimer 纳米液体的磁流体动力学 (MHD) 流动问题,该液体在经过非线性细长薄片时会产生粘性耗散。在纳米液体中加入旋转微生物有助于提高许多微生物系统的热效率。使用连续松弛 (SOR) 程序对单相流动问题进行了迭代求解。我们考虑了主要参数对运动微生物的流动速度、温度、密度和浓度的影响,并使用 MATLAB 在表格和图形中进行了描述。此外,我们还开发了一个比较表来检查所考虑流动问题的数值结果的准确性。Forchheimer 参数值的增加会导致速度分布的减小。根据研究结果,路易斯数和布朗运动参数往往会提高质量传输速率。

拟人机械臂假肢的设计与实现
摘要:假肢的开发和制造是医疗技术发展的重要趋势之一。考虑到现代电子技术和自动化系统的发展及其机动性和紧凑性,实际任务是制造一种假肢,其拟人化特性接近功能齐全的人体肢体,并能够高精度地再现其基本动作。本文分析了电子假肢控制系统开发的主要方向。本文介绍了拟人假肢原型及其控制系统的实际实施描述和结果。我们开发了一种拟人化的多指假手,用于机器人研究和教学应用。设计的机械手是其他已知 3D 打印机械手的低成本替代品,具有 21 个自由度——每个手指 4 个自由度,拇指 3 个自由度,2 个自由度负责机械手在空间中的位置。所展示的机械臂的开源机械设计具有接近人手的质量尺寸和运动参数,具有自主电池操作的可能性,能够连接不同的控制系统,例如计算机、脑电图仪、触摸手套。

解决环境空间垃圾问题的现代方法
太空垃圾是所有位于外层空间且不执行任何有用功能的人类活动产生的物体 [1]。在 20 世纪 50 年代末发射第一颗人造地球卫星后,近地空间被“太空垃圾”堵塞的问题立即出现 [2- 6]。太空垃圾的主要来源: 世界各国的太空活动; 因爆炸等意外毁坏太空物体; 太空物体的碰撞; 故意破坏。太空垃圾是太空活动的强制现象。在整个太空时代,航天器物体的数量不断增加。2019-2021 年出现了最显著的增长。太空垃圾对活跃的卫星、进一步的太空探索和地球生态构成危险,因此有必要对其进行监测。太空垃圾监测工具分为: 地面光学手段; 地面雷达设施; 天基设施。航天器监测工具的主要任务是测量空间物体的运动参数,以确定轨迹并将其输入空间物体目录中。为了评估近地空间的当前技术污染水平及其预测,使用普遍接受的模型:

预测术后右心室衰竭
† 作者对这项工作的贡献相同摘要在这项研究中,我们描述了一种新颖的“放射组学”方法,用于超声心动图人工智能系统,该系统能够从每个超声心动图视频中提取数十万个运动参数。我们将该人工智能系统应用于预测接受植入式循环生命支持系统的心力衰竭患者术后右心室衰竭(RV 衰竭)的临床问题。术后右心室衰竭是左心室辅助装置 (LVAD) 患者短期死亡的最大单一因素;然而,预测哪些患者在术前有发生这种并发症的风险,仍然超出了该领域专家的能力。我们使用标准 10 倍交叉验证报告测试数据集的结果。仅使用术前超声心动图,使用斯坦福 LVAD 数据集训练的人工智能系统的 AUC 为 0.860(95% CI 0.815-0.905;n = 290 名患者)。我们进一步表明,我们的系统表现优于配备当代风险评分(AUC 0.502 - 0.584)和独立测量的超声心动图指标(0.519 - 0.598)的委员会认证临床医生。

NeuroRehabititation中的机器人辅助运动分析
摘要:在神经康复领域,机器人辅助运动分析(R-AMA)可能有帮助,这有两个主要原因:(1)允许以更准确的方式注册和监视患者的运动参数,而不是临床量表(临床目的),以及(2)使用R-ama的数据量和(2)使用R-AMA的多种多类因素,并且可以使用R-ama的数量来构建MACHIME ALSTIVES,并且可以使用R-ama的数量来构建MACHINE ALGORT,结果(研究目的)。尽管在临床环境中具有潜力,但机器人评估工具仍未获得广泛的临床接受。与现有标准化量表相比,一些障碍仍然存在于其临床采用率。在这篇叙述性评论中,我们试图研究R-AMA系统对受神经系统疾病影响的患者的有用性。我们发现最常用的R-AMA工具是Lokomat(用于步态和平衡康复的外骨骼设备)和Armeo(用于恢复上肢损伤的功率和弹簧)。这些机器人设备提供的运动分析用于根据患者功能能力的客观定量来量身定制康复会议。脊髓损伤和中风患者是患有这些常见外骨骼的人。应考虑到能够预测运动准确性的生物力学参数,研究将机器人技术用作评估工具。