XiaoMi-AI文件搜索系统
World File Search System运动学的

类人机器人运动计划方法:调查
抽象的人形机器人是复杂的动态系统。任何类型机器人应用都始于确定在已知或未知环境中执行给定任务的一系列最佳路径序列。本文批判性地审查了有关人形机器人多级运动和任务计划的三个关键领域的可用文献。首先是在为人类设计的环境中导航和操纵对象时的效率。在这里,该研究已被总结为行为克隆方法。第二是在动态和不可预测的环境中操作引起的扰动和碰撞的鲁棒性。在这里,整合到运动计划算法中的建模方法一直是许多研究类人运动平衡和动态稳定性方面的研究人员的重点。最后是实时性能,其中,机器人必须根据最新的感官数据调整其运动,以实现所需的相互作用和响应性。在这里,重点是机器人的机械结构和关节运动施加的运动学约束。解决限制优化问题的迭代性质,向前和运动学的计算复杂性以及适应快速变化的环境的要求,所有对实时性能构成了挑战。这项研究已经确定了当前趋势,更重要的是,在指出需要进一步研究的领域,研究差距。

解码上肢辅助技术的脑机相互作用:进步和挑战
了解大脑编码上肢运动如何对于辅助技术中的控制机制至关重要。辅助技术,尤其是脑机界面(BMI)的进步突出了解码运动意图和运动学对有效控制的重要性。基于EEG的BMI系统由于其非侵入性和诱导神经可塑性的潜力而增强运动康复结果的潜力而显示出希望。基于EEG的BMI显示了解码运动意图和运动学的潜力,但研究表明与实际或计划的运动的相关性不一致,对实现精确和可靠的假体控制提出了挑战。此外,个体的预测性脑电图模式的变异性需要个性化调整以提高BMI效率。整合多个生理信号可以提高BMI的精度和可靠性,为更有效的运动康复策略铺平道路。研究表明,大脑活动在运动过程中适应引力和惯性约束,突出了神经适应生物力学变化在创建辅助设备控制系统中的关键作用。本综述旨在全面概述与生理和辅助上肢运动相关的解密神经活动模式的最新进展,从而强调了在神经疗程和脑镜界面发展中未来探索的途径。
增材制造薄壁金属晶格的破碎:双尺度应变局部化分析
建筑结构的响应以多尺度运动学为特征,其复杂关系及其对工程荷载响应的影响仍未完全了解,因此需要进一步研究。更确切地说,缺乏能够提供多尺度数据的实验方法仍然是一个关键问题。本文介绍了对定向能量沉积制造的薄壁拉胀金属晶格进行的压溃试验的实验和数值分析。这项工作重点关注发生在 (a) 晶胞微观尺度和 (b) 对应于均质连续体的宏观尺度上的两尺度应变局部化。感兴趣的结构被定义为 2D 拉胀线框的挤压,并允许应用专门用于识别两个考虑尺度上的运动学的改进的数字图像相关方案。具体而言,通过跟踪晶格交叉的变形来研究微观运动学,而从虚拟晶胞角的运动推导出宏观应变。结果表明,晶格的整体弹塑性响应完全由特定位置的塑性铰链形成所驱动,从而导致特征变形模式,并最终导致相邻晶胞的集体行为。配套有限元计算与实验结果非常吻合,因此能够评估建模假设、晶胞几何形状、应变率和几何缺陷对建筑材料整体响应的影响。

屏障增强的平行同位轨迹优化针对安全至关重要的自主驾驶
摘要 - 在防止过度保守行为的同时,对自动驾驶行为进行高度任务至关重要。在本文中,我们提出了一种屏障增强的平行同位轨迹优化(BPHTO)方法,使用过度删除的乘数交替方向方法(ADMM)进行实时集成决策和计划。为了促进自我车辆(EV)与周围车辆之间的安全相互作用,根据屏障功能,开发了一个时空安全模块,该模块展示了双向脉冲。在计划范围内的不同时间步骤中采用了不同的障碍系数,以解释周围HVS的不确定性并减轻保守行为。此外,我们利用驱动器操作的离散特性来初始化基于可及性分析的名义面向行为的自由式同型轨迹,并且每个轨迹在本地限制为特定的驾驶操作,同时共享相同的任务目标。通过利用安全模块和EV的运动学的双凸度,我们将BPHTO作为BI-CONVEX优化问题。然后使用约束转录和过度删除的ADMM来简化优化过程,从而可以实时生成多个轨迹,并具有可观的保证。通过一系列实验,拟议的开发显示了使用合成和现实世界流量数据集在各种交通情况下的任务准确性,稳定性和一致性的提高。

标准:一种用于评估自动驾驶轨迹预测模型的新基准测试范式
摘要 - 基准测试是评估自主驾驶轨迹预测模型的常见方法。现有的基准测试依赖于数据集,这些数据集偏向于更常见的方案,例如巡航和基于距离的指标,这些指标是通过在所有方案中平均计算得出的。在这样的团之后,就他们如何处理不同的场景以及其产出的可接受和多样化而言,对模型的性质提供了一些深刻的见解。存在许多旨在衡量轨迹的可接受性和多样性的互补指标,但是它们遭受偏见(例如轨迹的长度)。在本文中,我们提出了一种用于评估轨迹预测方法(Crite-ria)的新基准测试范式。特别是我们建议1)一种根据道路的结构,模型的性能和数据正确的数据来提取不同级别的驾驶场景的方法,用于预测模型的细粒度排名; 2)一组新的无偏见指标,用于通过考虑由现实世界驾驶限制的动机,通过考虑道路和运动学的结构来纳入给定场景的特征和可接受性。 3)使用拟议的基准测试,我们使用大规模argoverse数据集对一组代表性的预测模型进行了广泛的实验。我们表明,所提出的基准可以对模型产生更准确的排名,并作为表征其行为的手段。我们进一步进行了消融研究,以强调用于计算拟议指标1的不同元素的贡献。

tidhy:通过超网络的时间尺度解散,从混合观察中学习同时动态
神经活动和行为来自多个并发的时变系统,包括神经调节,神经状态和历史;但是,大多数当前方法将这些数据建模为具有单个时间尺度的一组动力学。在这里,我们通过Hy Pernetworks(Tidhy)开发了Ti Mescale d emixing,作为一种新的计算方法,用于建模临时数据,将它们分解为多个同时的潜在动力学系统,这些动力系统可能跨越刻板级的阶数不同的时间表。具体来说,我们训练一个超网络以动态重新重新获得潜在动力学的线性组合。此方法可以实现准确的数据重建,收敛到真正的潜在动力学并捕获多个变化的时间尺度。我们首先证明Tidhy可以从包含多个独立开关线性动力学系统的合成数据中删除动力学和时间尺度,即使观察结果混合在一起。接下来,使用模拟的运动行为数据集,我们表明tidhy准确地捕获了运动运动学的快速动力学和不断变化的地形的缓慢动力学。最后,在开源的多动物社会行为数据集中,我们表明用Tidhy提取的关键点轨迹动力学可用于准确识别Multiple小鼠的社交行为。综上所述,Tidhy是一种强大的新算法,用于将同时的潜在动力系统与不同的计算域应用。

卡尔加里大学第十六届年度生物医学工程...
会议 1 - 人类活动 (KNB 214) 会议主席:Karson Fitzsimons 评委:Kirsten Bott 和 Sam Leech 9:20 - 前臂拐杖长度对上肢运动学的影响 演讲者:Amanda Chen 指导老师:Ranita Manocha 博士 9:30 - 周期性负荷中断对牛皮质骨的影响 演讲者:Tudor Muresan 指导老师:Brent Edwards 博士 9:40 - pH 值的变化如何影响肌联蛋白中的应激?演讲者:Nikhil Srivalsan 主管:Walter Herzog 博士 9:50 – 胫骨加速度不是预测肌肉骨骼负荷的有效替代测量指标 演讲者:Jean Tu 主管:Brent Edwards 博士 10:00 – 脑瘫儿童剥皮肌肉纤维的主动力 演讲者:Gavin Thomas 主管:Venus Joumaa 博士和 John Holash 博士 10:10 – 整理支撑:预测马的肌腱拉伤 演讲者:Sammy Patwary 主管:John Bertram 博士 10:20 – 研究免疫荧光标记的骨骼兔腰肌肌节长度不均匀性和力量 演讲者:Dhairya Desai 主管:Walter Herzog 博士 10:30 – 延迟 3 周益生元纤维干预对脂肪的影响雌性斯普拉格道利大鼠股外侧肌的浸润 演讲者:Arman Murani 主管:Walter Herzog 博士
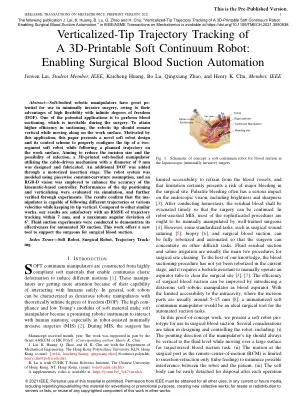
3D打印机软件机器人的垂直尖端轨迹跟踪:启用手术血液吸力自动化
摘要 - 富有的机器人操纵器在微创手术中非常有用,这是由于它们具有高度灵活性的优势,并具有无限的自由度(DOF)。潜在的应用之一是进行吸血,这在手术过程中是不可避免的。为了在吸力方面提高效率,机器人尖端应保持垂直,同时沿工作表面移动。是出于本应用的激励,本文提出了一种新颖的软机器人设计及其控制方案,以正确配置两段软机器人的尖端,同时遵循工作表面上的计划轨迹。旨在减少切口尺寸和感染的可能性,设计和制造了直径为9毫米的电缆驱动机构的3D打印的柔软的操纵器。通过电动插入阶段添加了额外的DOF。使用分段恒定曲率假设对机器人系统进行建模,并采用RGB-D视觉来增强基于运动学的控制器的准确性。通过模拟评估了尖端定位和垂直化的性能,并通过实验进一步验证。结果证实了Ma-nipulator能够在各种速度下遵循不同轨迹的同时保持其尖端垂直。与其他类似的作品相比,我们的结果是在7 mm以内的轨迹跟踪RMSE和6°的最大角度偏差之内令人满意的。流体吸力实验,以证明其自动3D吸力的有效性。这项工作提供了一种新工具,可以支持外科医生进行手术吸血。

使用SRIM代码来计算γ射线引起的辐射损伤
摘要。的结构特性,例如用γ射线照射的材料的机械和电性能受到位移损伤的影响。具有不同行为的连续过程最终导致材料内“缺陷”集的形成,例如,它可能导致物质变得脆弱。在这项研究中,蒙特卡洛代码使用基于代码的原子原子或PKA的基于代码的模拟方法提供信息,从而造成损坏。也,计算了由钴60源对铁结构特性的伽马辐射造成的损伤速率。要访问PKA信息,已经开发了一个名为Gammatrack的程序。此软件提供有关被拒绝的原子属性和相互作用运动学的信息。理论计算方法也已用于确认蒙特卡洛方法的结果。使用生成的二级电子,物质(SRIM)代码的停止和离子范围可以计算伽马辐射造成的损害。PKA数据是通过Gammatrack程序提取的,可以用作SRIM代码的输入,以进行系统分析伽马损伤。获得的铁的PKA光谱与以前的作品一致。可以意识到只生产单元,并且在钴60辐射下,原子 - 原子碰撞的可能性可以忽略不计。因此,将排除创建PKA级联反应。此外,在〜10 - 7,10 - 8(每个原子位移(DPA) /年)的理论和蒙特卡洛法(MCNPX + SRIM代码)计算时,计算铁靶的损伤率。

由活性上肢外骨骼的不同水平的透明度引起的人类运动修饰
主动上肢外骨骼是神经恢复的潜在强大工具。该潜力取决于几种基本控制模式,其中一种是透明度。在这种控制模式下,外骨骼必须遵循人类运动而不会改变它,从理论上讲,这意味着无效的相互作用工作。达到透明度的水平高,尽管不完美,既需要一种适当的控制方法,又需要对外骨骼对人类运动的影响进行深入评估。本文基于识别外骨骼动力学的识别,或者是在力反馈控制或结合下引入了三种不同的“透明”控制器的评估。因此,这些控制器可能会通过设计明显诱导不同水平的透明度。进行的调查可以更好地理解人类如何适应一定是不完事的透明控制器。一组14名参与者受到这三个控制者的束缚,同时在副臂平面进行运动。随后的分析是根据相互作用,运动学,肌电图和人体工程学反馈问卷进行的。结果表明,在执行透明的控制器较少的情况下,参与者的策略往往会引起相对较高的相互作用工作,并具有较高的肌肉活动,从而导致运动学指标的敏感性很小。换句话说,截然不同的残留互动工作并不一定会引起非常不同的运动运动学。这样的行为可以通过自然的人类倾向来解释以维护其首选的运动学的努力,应在将来的透明控制器评估中考虑到这一点。