XiaoMi-AI文件搜索系统
World File Search System避碰

社论:系统生物学和合成生物学与植物抗旱或避旱的关系
干旱胁迫长期以来一直是农作物生产的制约因素,而气候变化和随之而来的农业用蓝色水资源减少则加剧了这一问题。大多数现有的粮食和经济作物都易受干旱胁迫的影响,干旱胁迫会造成农作物产量的大幅下降。因此,在不久的将来,我们开发出更能适应气候、更耐热、更耐旱的作物的能力将变得越来越重要。自然界中,植物进化出了两种重要的机制来克服干旱胁迫的影响:(1)避旱,通过最大限度地减少水分流失和优化水分吸收,使植物在缺水的环境中保持相对较高的组织含水量;(2)耐旱,通过维持细胞膨压(由渗透调节和细胞弹性引起)和提高原生质抗性,使植物能够忍受低组织含水量( Basu et al.,2016 )。随着可用于研究不同植物谱系的基因组资源越来越多,这些植物在抗旱或避旱方面表现出不同的策略和差异 ( Yin et al., 2014; Abraham et al., 2016; Yang et al., 2017; Chen et al., 2018 ),系统生物学以基因组规模的分子及其相互作用分析 ( Westerhoffiand Palsson, 2004 ) 为特征,正成为将基因与抗旱或避旱性状联系起来的一种流行方法。系统生物学研究产生的与干旱胁迫反应相关的基因的知识可以为构建合成生物学的生物部件文库提供信息,合成生物学旨在设计或重新设计生物过程 ( Cook et al., 2014 )。合成生物学在创造具有增强的抗旱或抗旱能力的转基因植物方面具有巨大潜力(Borland 等人,2014 年;De Paoli 等人,2014 年;Llorente 等人,2018 年)。本研究主题包括三篇以景天酸代谢 (CAM) 系统生物学为主题的文章,作为植物适应缺水条件的模型策略,以及四篇与使用合成生物学和基因工程方法对植物抗旱或抗旱进行遗传改良有关的文章。

无人机灯光秀系统
摘要:无人机灯光秀(UAV-LS)相较于传统烟花具有环保、可控等优势,具有令人赞叹的魅力。本文开发了UAV-LS系统,包括无碰撞编队变换轨迹规划算法、用于动画设计和实时监控的软件包以及硬件设计与实现。特别地,提出了一种基于图论的动态任务分配算法,以减少无人机避碰对任务分配的影响以及编队变换中任务分配的频率。此外,软件包包括用于编队绘制和3D动画模拟的动画界面,这有助于通过实时监控应用程序对无人机进行监控。开发的UAV-LS系统硬件包括决策子系统、实时动态(RTK)全球定位系统(GPS)、无线通信和无人机平台等子系统。使用六台四旋翼飞行器进行了室外实验,并详细介绍了高精度定位、通信和计算的实现。结果表明,开发的UAV-LS系统可以成功完成灯光秀,并且提出的任务分配算法比传统静态算法表现更好。

“我不是在碰你。这是机器人!”:通过基于触摸的机器人在混合视野儿童中包含
视觉障碍的儿童通常由于视觉提示的访问有限而难以在小组活动中进行全面参与。他们很难感知正在发生的事情,何时以及如何采取行动 - 对有和没有视觉障碍的儿童的领导对小组活动感到沮丧,从而减少了相互作用。为了解决这个问题,我们创建了Thinibo,这是一种触觉讲故事的机器人,该机器人在多感觉环境中作用,鼓励基于触摸的互动。Touchibo为组交互提供了一个包容性的空间,因为在混合视觉上下文中,触摸是一种高度可访问的方式。在一项涉及107名儿童(37名视觉障碍)的研究中,我们将Touchibo与仅一位音频讲故事的人相提并论。结果表明,Touchibo显着改善了儿童的个人和团体参与感,基于触摸的互动,讲故事的人更加讨人喜欢和乐于助人。我们的研究强调了基于触摸的机器人通过促使人际交往的触摸来丰富儿童社交互动的潜力,尤其是在混合视觉能力环境中。

商务部新闻稿
国对一些最亲密盟友的承诺,促进我们的集体安全,减少不必要的出口管制限制,并确保贸易安全。2. 在一项临时最终规则中,BIS 取消了向全球 40 多个盟友和合作伙伴出口某些航天器部件的许可要求,降低了大多数目的地最不敏感部件的许可要求,并扩大许可例外范围以支持其他美国国家航空航天局 (NASA) 合作项目。这些变化促进了国际合作,并巩固了美国在航天技术领域的全球领导地位。3. 此外,在与国务院联合发布的拟议规则中,BIS 概述了初步提议,将某些不再提供关键军事或情报优势的太空相关国防物品的管辖权从国务院维护的美国军火清单 (USML) 转移到商业管制清单。例子包括能够为其他航天器加油的航天器和能够自主避碰的航天器。这项拟议的转移将允许使用 BIS 许可例外,促进向亲密盟友和合作伙伴出口商业航天物品。美国商务部工业和安全局欢迎所有相关方在本拟议规则发布后 30 天内发表公开评论。

双基地和多基地 SAR 中振荡器噪声的影响
I. 引言 双基地和多基地合成孔径雷达 (SAR) 系统通过安装在不同平台上的发射和接收天线进行操作 [1], [2]。这种空间分离具有多种操作优势,将提高未来星载 SAR 任务的能力、可靠性和灵活性 [3], [4]。双基地和多基地卫星配置的强大应用包括单程横轨和沿轨干涉测量、高分辨率宽幅 SAR 成像、用于改进场景分类的双基地成像、分辨率增强、SAR 层析成像和频繁监测 [4]。然而,双基地和多基地 SAR 任务的实施也带来了一些新的挑战,例如近距离卫星编队中的避碰、为提供适当基线的轨道设计、增加对模糊性的敏感性以及仪器同步 [4]–[12]。本信讨论了双基地和多基地 SAR 数据采集过程中振荡器稳定性有限的影响。在分布式 SAR 系统中,振荡器误差值得特别关注,因为在单站 SAR 中,低频相位误差不会消除,而单站 SAR 中相同的振荡器信号用于调制和解调 [7]。为了进行定量研究,我们在第二部分中引入了一个系统理论模型,该模型在随机过程框架内描述了超稳态振荡器 (USO) 的残余相位误差

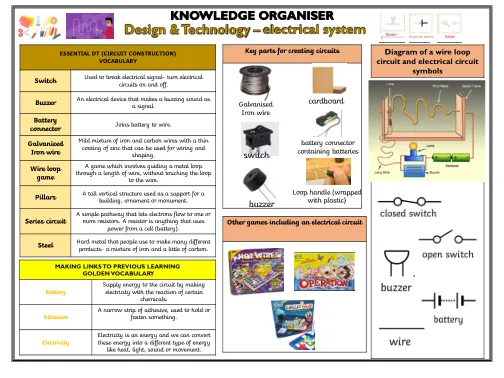
KHC & AHC 大脑增强剂
通过按下蜂鸣器、响铃或手机闹钟来宣布这项大脑增强活动。学生从椅子上跳起,完成“起床!”舞蹈。从四部分动作开始,例如向左跺脚、跳跃两次、转圈和与同学碰拳。再重复该动作两次。接着进行第二个四部分动作,例如向右跺脚、跳跃两次、触摸脚趾和与同学碰肘。再重复该动作两次,然后一起表演这两个动作。告诉学生,他们可能想在早上醒来时尝试一下这个舞蹈!
Euro NCAP AEB C2C 测试协议 - v4.3.1
1 引言 车对车追尾碰撞是道路上最常见的事故之一,主要由于驾驶员分心或判断失误。城市驾驶中,典型的追尾碰撞通常发生在车速相对较低、受撞击车辆已处于静止状态的情况下,但被撞击车辆驾驶员遭受严重颈椎扭伤的风险很高。虽然受伤程度通常较低,但这类事故非常常见,占所有碰撞事故的四分之一以上。类似的事故场景也发生在中高速行驶的开放道路上,驾驶员可能会分心,无法意识到前方车辆已停止、即将停止或以较低的速度行驶。其他常见的碰撞类型包括在路口行驶时与迎面而来的或穿过的车辆碰撞,以及偏离车道时与迎面而来的车辆碰撞。道路布局的复杂性以及安全穿越其他车辆所需的感知、判断和动态操控能力,都对驾驶员提出了挑战。为了帮助驾驶员避免这些常见的碰撞类型,汽车制造商提供了避碰技术,可以发出警告、支持充分制动并/或最终自动停止车辆。该协议规定了旨在应对这些常见碰撞类型的 AEB 车对车测试程序,这些程序是安全辅助评估的一部分。要获得 AEB 车对车测试的分数,前排座椅必须获得良好的鞭打评分。该系统将在该协议详述的七个场景中进行测试。

用于探测月球的智能着陆器 (SLIM) 结果来自......
避障后,着陆点瞄准图中安全区域的中心。现在优先考虑安全性,选择先避障,然后准确降落在目标地点(因此航天器瞄准了距离目标地点 11.8 米的地点)。因此,在避障之前先评估精确着陆的准确性。