XiaoMi-AI文件搜索系统
World File Search System酉类

维度和复杂性类的结构
1。该点原理最近被用来证明分形几何形状的新定理,具有资源为基础的实例。这些实例是根据X的各个元素的相关资源结合的尺寸来表征语言集合X的资源X的维度,但前提是以前的资源绑定足以参数后者。因此,例如,EXP中语言X类的尺寸是根据x单个元素的相关p维度来表征的。2。每种≤Pm可用于P-选择性集合的语言都有p-dimension 0,并且此事实相对于任意甲骨文而言。结合了点对集合原理的资源有限实例,这意味着如果NP在EXP中具有正尺寸,则NP的quasipolynomial time选择性语言为≤pm-hard。
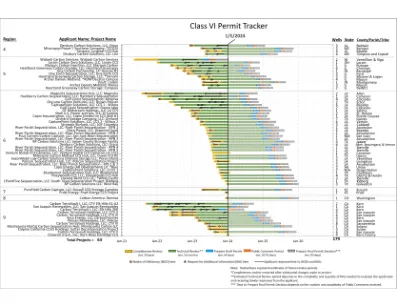
VI类许可跟踪器
Wabash Carbon Services: Wabash Carbon Services 2 IN Vermillion & Vigo Lorain Carbon Zero So lut ions, LLC: Lorain CCS 1 OH Lorain Marquis Carbon Injection, LLC: Mar~uis Carbon 1 IL Putnam Heartland Greenway Carbon Storagep LL C: Heartlan Greenwar 6 IL Christian One Carbon artnershig, LP : Hoosie r# 1 IN Randolph 5一个E Arth固换,LL:一个E Arth CCS 3 L Ford Heartland Greenwj! Sequestration Hu b, LL C: Magnolia 2 LA Allen Hackberry Carbon Sequestration( LLC : Hackberry Sequestration 1 LA Cameron Gui Coast Seques tr ation: Minerva 4 LA Calcasieu O xl Low Carbon Venture s, LLC: Brown Pelican 2 TX Ector apturePoint Solutions, LLC: CCS 1 - Wilcox 6 LA 2 LA ~:Pci1s1~u墨西哥湾沿海隔离:鹅湖

可解释的聚类:调查
摘要 - 近年来,关于聚类算法的许多研究主要集中在提高其准确性和效率上,通常以牺牲可解释性为代价。但是,由于这些方法越来越多地应用于医疗保健,金融和自主系统等高风险领域,因此对透明和可解释的聚类结果的需求已成为一个关键问题。这不仅需要获得用户信任,而且还需要满足这些领域不断增长的道德和监管要求。确保可以清楚地理解和合理的聚类算法的决策是基本要求。为了满足这一需求,本文对可解释的聚类算法的当前状态进行了全面且结构化的综述,并确定了关键标准以区分各种方法。这些见解可以有效地帮助研究人员对特定应用程序环境的最合适的可解释聚类方法做出明智的决策,同时还促进了既高效又透明的聚类算法的开发和采用。

综论报告类囊胚:
差异介质,TDM),nive pscs 透过自我组织的方式形成类囊胚( Yu等人,2021a)。polo polo(polo 团队则利用再程式化纤维母细胞((成纤维细胞))te te te te te te te te pre,pre,进行聚合形成称为iblastoids 的类囊胚( liu et al。 (腔)liu等人,2021; Yu等人,2021a)。人类类囊胚的制作方法经不断改,naive Esc或ipscs(Yanagida等,2021; Kagawa等,2022; Yu等人,2023年)、EPSCS(Fan等,2021; Sozen等,2021),以及8Clcs (Mazid等,2022; Yu等人,2022年),子宫内膜上皮细胞)(Kagawa等,2022)(2022))子宫内膜基质细胞(2023)(2023))(2023))进进

COM596 类脑人工智能
论文演示视频 在这项作业中,3 名学生组成的小组需要准备一段 20 分钟的演示视频,内容是关于一篇来自大脑启发式人工智能文献的文章。将提供一份潜在论文清单,但学生可以根据自己的意愿要求其他论文(但选择必须得到导师的批准)。演示必须使用幻灯片进行,但您可以使用任何录音设备、编辑软件等进行演示。它甚至可以只是手机上的录音。唯一的要求是您以标准视频文件格式(例如 avi、mp4、mov 等)提交视频,并将其上传到 myCourses。演示时间不能超过 20 分钟——如果超过,您将被扣分!!!!您不需要在视频中展示任何人的脸,只需显示幻灯片,但您的声音必须可听见。此外,重要的是
Rampion 2 风电场第 7 类:其他文件
2.5.1 在设立了 C-60 表 6-1 规定的考古禁区 (AEZ) 并使用了《考古发现协议》(PAD) 附件 A 的海洋区域内工作的承包商必须确保所有相关人员了解相关要求。避开 AEZ 还必须考虑到在规划作业时充分考虑锚和线的使用,因为这可能会影响直立特征。这将包括了解《海洋 WSI 大纲》以及报告意外考古发现的所有程序和通信线路。

1 类通函 - Eurowag
如果您出售或转让或已出售或以其他方式转让您的所有普通股,请立即将本文件连同随附的代理表格发送给购买者或受让人,或发送给进行销售或转让的股票经纪人、银行或其他代理人,以便转交给购买者或受让人。但是,法律可能会限制将本文件和/或任何随附文件分发到英国以外的某些司法管辖区。因此,持有本文件和任何随附文件的人员应了解并遵守任何此类限制。任何不遵守这些限制的行为都可能构成违反此类司法管辖区的证券法。如果您已出售部分普通股,请保留本文件和随附的代理表格,并立即联系进行销售或转让的银行、股票经纪人或其他代理人。
批准 I 类和... 的标准
4 运行概念 4.1 最低标准的分类和适用性 4.2 起飞 4.3 着陆 4.3.1 进近和着陆概念与目标 4.3.1.1 运行安全评估 4.3.1.2 主要和辅助导航方式及所需导航性能 (RNP) 4.3.1.3 使用 ICAO 标准导航设备 4.3.1.4 标准仪表进近程序 (SIAPS) 4.3.1.5 “大角度进近”和进近路径下降角限制 4.3.1.6 “正常机动”考虑 4.3.1.7 非正常事件或配置 4.3.1.8 复飞安全 4.3.2 ILS、GLS 或 MLS (xLS) 仪表进近操作 4.3.3 ILS、GLS 或 MLS (xLS) 以外的仪表进近4.3.4 DA(H),MDA(H)或RA的适用性4.3.4.1将DA(H)应用于I类4.3.4.2在I 4.3.4.3应用DA(H)或等效(即INTER MARKER)的应用中,将MDA(H)应用于类别II 4.3.4.4.4.4。4.3.5 能见度和 RVR 最低标准 4.3.6 着陆的能见度评估和 RVR 等效性 4.3.7 I 类运行和最低标准的一般要求 4.3.7.1 I 类定义、背景、分类和一般标准 4.3.7.2 “xLS”程序 - 最低标准不小于 200 英尺 DA(H) 4.3.7.3 “3D”RNAV 程序 - 最低标准不小于 200 英尺 DA(H) 4.3.7.4 “3D”RNAV 程序 - 最低标准不小于 250 英尺 DA(H) 4.3.7.5 “2D”RNAV 程序(例如基于 VOR/DME 的 RNAV 或基于 GPS 的 RNAV)- 最低标准不小于 250 英尺 MDA(H) 4.3.7.6 其他程序比 xLS 或 RNAV 更宽的距离(例如 VOR、NDB、LOC、后方航向 LOC 或 ASR 程序) - 最低标准不小于 250 英尺 DA(H) 4.3.7.7 其他特殊程序或授权 4.3.7.8 先前批准的 I 类运行或使用先前或新的 I 类标准 4.3.8 II 类要求 4.3.8.1 一般 II 类要求 4.3.8.2 II 类 DA(H) 的规范 4.3.8.3 II 类最低标准的资格不小于 100 英尺 DA(H)


ACS 类飞机飞行教练
任务 A. 正常起飞和爬升................................................................................................................................ 34 任务 B. 正常进近和着陆............................................................................................................................... 35 任务 C. 软场起飞和爬升(ASEL)......................................................................................................................... 37 任务 D. 软场进近和着陆(ASEL)..................................................................................................... 38 任务 E. 短场起飞和最大性能爬升(ASEL、AMEL)............................................................................. 39 任务 F. 短场进近和着陆(ASEL、AMEL)............................................................................................. 41 任务 G. 受限区域起飞和最大性能爬升(ASES、AMES)............................................................................. 42 任务 H. 受限区域进近和着陆(ASES、AMES)............................................................................................. 44 任务 I. 玻璃水面起飞和爬升(ASES、AMES)............................................................................................. 45 任务 J. 玻璃水面进近和着陆(ASES、AMES)............................................................................................. 46 任务 K.浪高水面起飞和爬升(ASES、AMES)............................................................................................. 47 任务 L. 浪高水面进近和着陆(ASES、AMES)....................................................................................... 49 任务 M. 滑行着陆(ASEL、ASES)....................................................................................................... 50 任务 N. 复飞/中断着陆.................................................................................................................... 52 任务 O. 断电 180° 精度进近和着陆(ASEL、ASES)......................................................................... 53