XiaoMi-AI文件搜索系统
World File Search System里程表

仪表 - Passion-Harley
A.组合式模拟速度表/转速表 – 5 英寸 保持车把上方的清晰视野。这款独特的组合式速度表/转速表让您无需添加安装在车把上的转速表即可监控发动机转速。该装置安装在原装仪表板开口中,是直接插入式安装。仪表具有顺时针扫描的速度表和转速表指针,以提供“仪表中的仪表”外观。背光仪表包括一个大型 LCD(液晶显示屏)信息屏幕,可显示里程表/短距离里程表数据、剩余里程读数、易于阅读的分段式燃油显示、档位指示器和时钟。骑手一眼便可看到这些有价值的信息。仪表具有按钮可调节背光,有 600 多种色调可供选择,允许骑手调整指针、LCD 和背光颜色以匹配任何涂装方案或观看偏好。套件包括一条数据传输线,可在安装时轻松上传初始里程。

行星轮移动机器人自主移动性的进展:综述
五十多年来,轮式移动机器人 (WMR) 已被证明是太空探索和行星任务中不可或缺的一部分。能够穿越各种各样的环境、机动性、能够被引导至特殊位置以及相对于其他平台更低的重量和功耗是其越来越受欢迎的原因。图 1 描述了过去、现在和未来在不同地外天体上执行任务的著名 WMR。有关行星 WMR 的全面参考书目,请参阅(Sanguino,2017)。行星上的 WMR 的运行需要复杂的软件和硬件解决方案来进行制导、导航和控制(GNC)。这确实是因为地外天体上的条件不同。复杂而未知的环境、与异质土壤的相互作用、陡坡、松散和多相地形、在低重力区域行驶、恶劣的照明条件、GPS 信号不可用、功耗限制以及嵌入式系统的计算限制都是开发 GNC 模块时必须处理的关键挑战(Quadrelli 等人,2015 年)。里程表或车辆相对于某些局部参考的姿态和方向知识是 GNC 算法的关键组成部分。由于存在限制和不确定性,当前的行星 WMR 依靠与地面站的远程通信来执行里程表并规划安全运行。这种地面在环操作可缩短车辆在环路中停留的时间。
远程信息处理情况说明书
机构可享受 GSA Fleet 月度租赁费用,无需负担即可在租赁车辆上安装远程信息处理解决方案。该解决方案可收集全面的车辆数据,例如发动机诊断、维护警报和真实里程表读数,以自动生成每月里程报告并改善维护管理。机构可通过购买附加服务订阅来访问其他 GPS 服务,并通过每月 GSA Fleet 租赁发票简化计费。
卫星导航是重要的基础设施管理技术
在此,值得强调的是计算在限制区内行驶的距离的潜在重要性。理论上污染较少的车辆实际上可能在一年内造成更多污染,因为它们在低排放区行驶了较多的公里数。另一方面,被归类为污染较多的车辆如果只是偶尔使用这些区域,污染可能会较少。因此,可能可以提出更公平的策略,以更符合车辆实际的低排放区使用情况。基于虚拟 GNSS 的里程表可以跟踪给定车辆行驶的距离,而不是仅基于所用车辆类型的独立系统。
![PGM 数据表 [DS-110005-04].pdf](/simg/d\d2e3b3b71b53c0fd0985c898f8eb36a97d697227.webp)
PGM 数据表 [DS-110005-04].pdf
Swift Navigation 精密 GNSS 接收器 mPCIe 模块 (PGM) 通过全球导航卫星系统 (GNSS) 定位和惯性传感器融合技术 (INS),在最恶劣的环境中实现低成本精密导航。该产品采用行业标准的“全”Mini PCI Express 模块外形设计,非常适合作为带有 mPCIe 扩展槽的嵌入式计算平台的附加组件,以及需要精密定位的应用,例如汽车、机器人、高精度数据收集、视频/传感器位置和图像时间标记。该模块专为主机应用处理器上的 Swift Navigation Starling® 定位引擎而设计,用于实时精密导航,具有双频 L1/L5 载波相位差分 GNSS RTK 和惯性/里程表传感器融合。
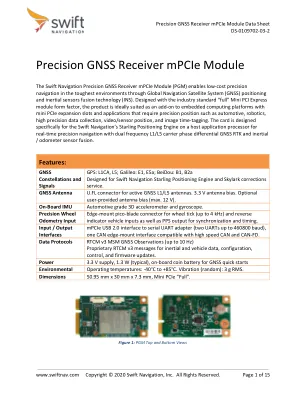
精密 GNSS 接收器 mPCIe 模块
Swift Navigation 精密 GNSS 接收器 mPCIe 模块 (PGM) 通过全球导航卫星系统 (GNSS) 定位和惯性传感器融合技术 (INS),在最恶劣的环境中实现低成本精密导航。该产品采用行业标准的“全”Mini PCI Express 模块外形设计,非常适合作为带有 mini PCIe 扩展槽的嵌入式计算平台的附加组件,以及需要精密定位的应用,例如汽车、机器人、高精度数据收集、视频/传感器位置和图像时间标记。该卡专为主机应用处理器上的 Swift Navigation Starling 定位引擎而设计,用于实时精密导航,具有双频 L1/L5 载波相位差分 GNSS RTK 和惯性/里程表传感器融合。

四轮手机的纯追求控制器策略...
在本文中使用了纯追求算法(PPA)来解释四个轮子的汽车如何移动。MATLAB环境具有广泛的模拟功能,可以准确地代表复杂的机器人行为。是这些部署的是对机器人操作动力学的扩展分析。在MATLAB/SIMULINK框架中,从不同算法获得的航路点定义了机器人轨迹。一个里程表传感器有助于本地化机器人,从而在其位置上提供了准确的实时信息。在批判性地评估了几个性能指数之后,很清楚该控制算法的工作状况如何,因为它将机器人从初始状态顺利移动到其目标,几乎完全没有振荡。模拟的发现确认,如果选择了适当的lookahead距离,那么机器人可以有效地跟踪航路点并沿着轨迹保持最佳路径,直到终于到达目标点
埃德温·奥尔森(Edwin Olson)的副本,可能的移动性美国运输的未来:
•ebike补贴如何(与使用较差的常规运输系统上的花费$ 2/人英里,这是填充私人汽车的成本10倍)?•为什么不需要upzoning?(如加利福尼亚州 +明尼阿波利斯(Minneapolis)所允许的单户地段允许使用2个以上的单位)•为什么不对道路的全成本定价(5¢/mile),我们自己的排放(1至10¢/英里),停车(0.10至$ 1/小时)?•同行国家已经需要自动制动行人和限制器 + 25¢RFID标签用于车辆注册,在危险环境中自动执法,基于GPS的通行费(或基于里程表的读数)的板载加密狗(或者读取),以及各种车辆注册费和销售税,按尺寸和迁移水平,可提供尺寸和移民级别,提供零件,提供零件,以及更多。美国落后于同龄人。