XiaoMi-AI文件搜索系统
World File Search System阶块
块上的新心
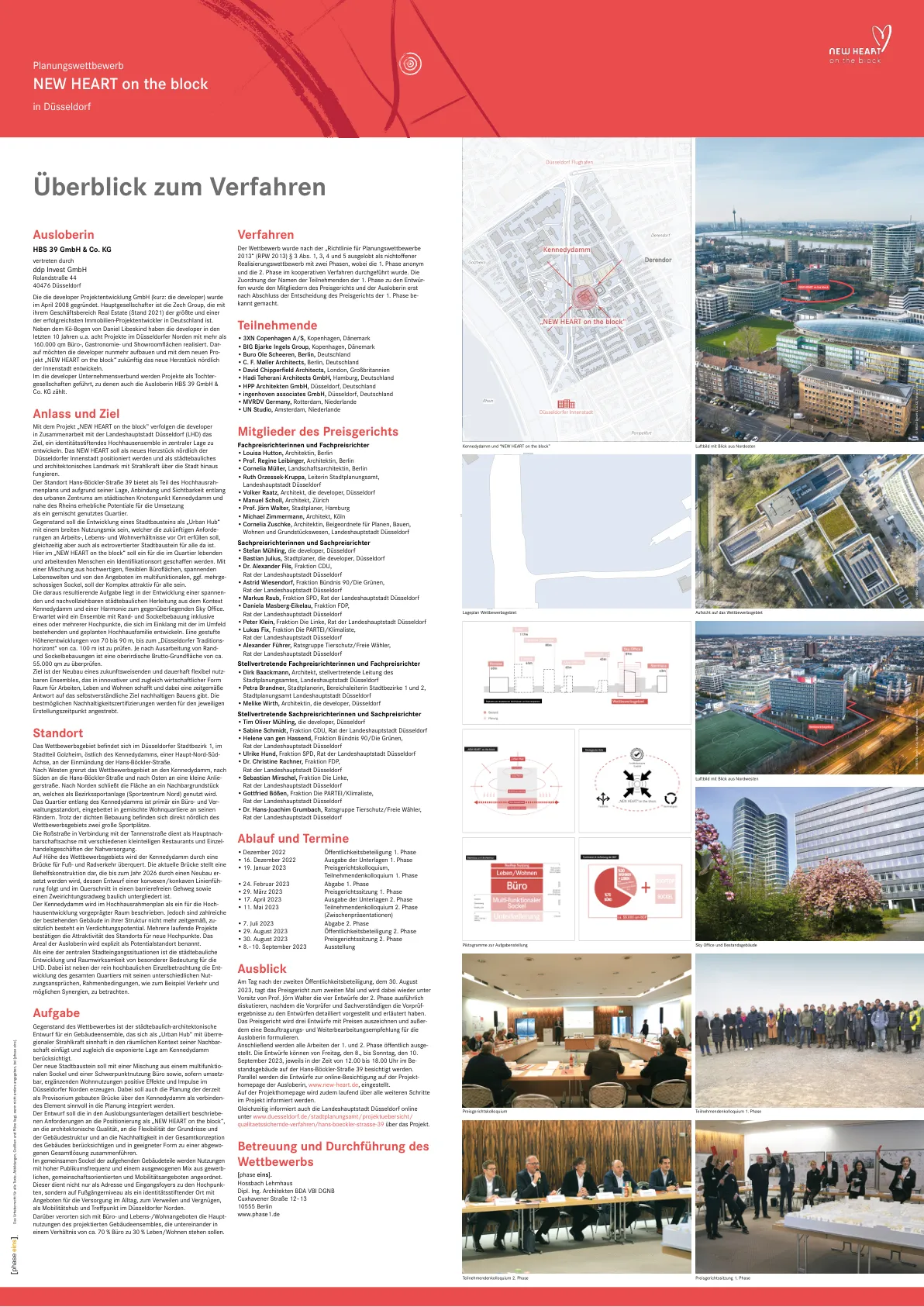
与项目“新心”的项目与州首都杜塞尔多夫(LHD)合作的开发商实现了在中心地点开发身份 - 创造高级合奏的目标。新的心脏将被定位为杜塞尔多夫市中心以北的新心脏,并充当城市规划和建筑地标,并在城市以外的范围内充满光芒。Hans-Böckler-Straße39的位置提供了相当大的实施潜力作为高层框架计划的一部分,并且由于其位于Kennedyydamm Urban节点的城市中心的位置,连接和可见性。主题应该是城市模块的开发为“城市枢纽”,其用途广泛,旨在满足现场工作,生活和生活条件的未来信息,但也适合每个人作为外部组织外城市模块。在“街区的新心”中,要为在附近生活和工作的人们提供身份证明的地方。具有高质量,灵活的办公空间,令人兴奋的生活环境以及多功能(可能多拍的基础,该建筑群应该对每个人都有吸引力。由此产生的任务在于从肯尼迪姆(Kennedydamm)的背景下发展紧张和可以理解的城市衍生作品,以及对对面的天空办公室的和谐。从70 m到90 m到“杜塞尔多夫传统地平线”的分级高度开发。必须检查100 m。是一个边际和底座发展的合奏,其中包括根据该地区现有和计划的高层家族发展的一个或多个高点。取决于边缘和基座建筑物的详细说明,是地上的基本区域。检查55,000平方米。的目标是建立一个前瞻性且永久灵活的合奏,这为工作,生活和生活创造了空间,以创新性和同时的经济形式,并为可持续建筑的自觉目标提供了当代答案。在各自的创建时间中寻求最好的可持续性认证。

使用... 开发飞行控制系统
为了简化调试,还实现了例程 off()。在调试模式下,可以通过 shell 输入“off”停止实时任务。函数 Controllaws() 由几个具有不同速率的定律组成。我们以 100 Hz 的速率计算控制增强系统,以 33.3 Hz 的速率计算自动驾驶定律和其他参数。为了提高运行效率,使用内部计数器而不是任务来调度这些定律。控制律通常由求和块、0 阶块、1 阶块、2 阶块、积分块、淡出块、死区块和饱和块组成。在我们的系统中,控制律块由 C++ 类实现。Tustin 变换具有叠加特性,因此软件可以按框图顺序处理控制律。为了简化系统调试,对于传感器输入和其他参数,使用浮点而不是整数作为数据类型;对于传感器输入,使用电压而不是实际物理值作为值。该软件是用 C++ 语言编写的。C++ 比 C 具有更多优势,例如封装和覆盖。有时,这会导致可靠性问题。在飞行控制应用中,应认真考虑这一点。我们的解决方案是:1)在实时任务运行之前创建所有对象; 2)在 IF-BIT 例程中检查系统健康状况。


混凝土块CB.pdf
CONCRETE BLOCK (CB) Production and Construction Guide ISBN : 978-81-87395-78-2 (4) Published by : Development Alternatives B-32, Tara Crescent, Qutub Institutional Area New Delhi 110016, India Tel: +91-11-2654-4100, 2654-4200 Fax: +91-11-2685-1158 Email: mail@devalt.org, Website: www.devalt.org Cover Photo Credit : Development Alternatives Author(s) : Zeenat Niazi, Pankaj Khanna, Suhani Gupta, Rashi Sirohi Layout : Binu K George Disclaimer This document is an outcome of a project titled, “Delivery of Eco-Friendly Multi-Hazard Resistant Construction Technologies and Habitat Solutions in Mountain States,重点:北阿坎德邦(Uttarakhand)由“科学技术部(DST),新德里(DST)”资助,用于我们社会的经济发展,社会赋权和环境管理。本文件旨在由政策制定者,学术界,政府,非政府组织和公众使用,以供有关利益事项的指导。使用本文档中包含的信息的决定和责任仅在于读者。作者和发布者因使用或应用本文档而对任何后果不承担任何责任。内容可以使用/引用,并有适当确认开发替代方案的确认。
基于PC-104嵌入式计算机的飞行控制系统开发
为了简化调试,还实现了例程 off()。在调试模式下,可以通过 shell 输入“off”停止实时任务。函数 Controllaws() 由几个具有不同速率的法则组成。我们以 100 Hz 的速率计算控制增强系统,以 33.3 Hz 的速率计算自动驾驶法则和其他参数。为了提高运行效率,使用内部计数器而不是任务来调度这些法则。控制法则通常由求和块、0 阶块、1 阶块、2 阶块、积分块、淡出块、死区块和饱和块组成。在我们的系统中,控制法则块由 C++ 类实现。Tustin 变换具有叠加特性,因此软件可以按框图顺序处理控制法则。为了简化系统调试,对于传感器输入和其他参数,使用浮点而不是整数作为数据类型;对于传感器输入,使用电压而不是实际物理值作为值。该软件是用 C++ 语言编写的。 C++ 比 C 具有更多优势,例如封装和覆盖。有时,这会导致可靠性问题。在飞行控制应用中,应认真考虑这一点。我们的解决方案是:1)在实时任务运行之前创建所有对象;2)在 IF-BIT 例程中检查系统健康状况。

巴西环境下高光谱图像块的辐射块调整
已在无人机中实施(Zarco-Tejada、González-Dugo 和 Berni,2012 年;Hruska 等人,2012 年;Büttner 和 Röser,2014 年;Suomalainen 等人,2014 年;Lucieer 等人,2014 年)。以 2D 帧格式原理运行的小型化高光谱成像仪是一种捕获光谱特征的新颖传感方法(Mäkynen 等人,2011 年;Saari 等人,2013 年;Honkavaara 等人,2013 年;Näsi 等人,2015 年;Aasen 等人,2015 年)。 2015)。 2D 帧格式由于其刚性的矩形几何形状和多个重叠图像而提供了强大的几何和辐射约束(Honkavaara 等人,2012 年)。该框架为无人机遥感提供了有趣的可能性,因为它可以产生比推扫式扫描,使用更少的地面控制点 (GCP) 和较低等级的惯性导航系统 (INS)。
1 阶量子 Wasserstein 距离 IEEE ... - IRIS
摘要 — 我们提出了将 1 阶 Wasserstein 距离推广到 n 个量子态的建议。该建议恢复了正则基向量的汉明距离,更一般地恢复了正则基中对角量子态的经典 Wasserstein 距离。所提出的距离对于作用于一个量子态的量子位元的排列和幺正运算是不变的,并且对于张量积是可加的。我们的主要结果是冯·诺依曼熵关于所提距离的连续性界限,这显著加强了关于迹距离的最佳连续性界限。我们还提出了将 Lipschitz 常数推广到量子可观测量的建议。量子 Lipschitz 常数的概念使我们能够使用半定程序计算所提出的距离。我们证明了 Marton 传输不等式的量子版本和量子 Lipschitz 可观测量谱的量子高斯浓度不等式。此外,我们推导出浅量子电路的收缩系数和单量子信道的张量积相对于所提出的距离的界限。我们讨论了量子机器学习、量子香农理论和量子多体系统中的其他可能应用。