XiaoMi-AI文件搜索系统
World File Search System零位

RAD 4000 系列软件要求...
A/D 校准。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。4 A/D 系数计算。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。5 BANK A 模式。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。6 BANK B 模式。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。6 BANK 用户模式。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。7 引导加载程序版本。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。7 校准插入。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。8 校准零位。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。9 个频道。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。10 清除。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。11

LVDT 信号调节技术 I 简介 ...
LVDT(线性可变差动变压器)是一种机电设备,其产生的电输出与单独的可移动磁芯的位移成比例。它由三个线圈组成,其中一个是变压器的初级线圈。另外两个线圈通常关于初级线圈对称,在正常运行时以相反方向串联连接以形成变压器次级线圈。当可移动变压器磁芯相对于两个次级绕组居中时,它们将具有相同幅度的感应输出电压,但极性或相位将相反。因此,次级线圈的净输出电压将为零。这个位置通常称为电气零位。当磁芯从零位移位时,一个次级线圈的输出会增加,而另一个线圈的输出会减少,从而产生与磁芯位移相关的非零差动输出电压。当磁芯从零位的一侧移动到另一侧时,该输出电压的相位会改变 180°。

DNA/DNR-AI-224
输入 通道数 4,同时采样 配置 全桥、半桥或四分之一桥 分辨率 18 位 输入范围†见下表。 采样率 100 kSamples/sec(最大板速率 400 kS/s) 精度 积分非线性±0.0015% 偏移误差@25°C,G=2 0.0005% 典型值 增益误差@25°C,G=2 0.003% 典型值 偏移漂移/°C 2ppm 典型值 / 10ppm 最大 增益漂移/°Cz 2ppm 典型值 / 10ppm 最大 整体误差<250µV 桥接电阻120、350 或 1000 Ohm 抗混叠滤波器* 自动,72 dB 最小抑制 输入阻抗10 MegOhm,最小 激励输出 通道数每通道两个(P+、P-),可独立编程 输出电压0 至±10 Vdc(每个输出); 20Vdc 差分跨度 分辨率 16 位 输出驱动电流 50 mA,最大值 输出误差 ± 5 mV,最大值,测量精度与模拟输入相同 分流校准**(见下页注释) 分流范围 6.7 k 至 170k Ohm(拉力或压力)内部。还提供两个用于用户提供的分流电阻的连接。 分流分辨率 ~1.1 kOhm 分流读回精度** 返回读数的 ±0.02% 自动桥零位/平衡 零位/平衡范围 19 位分辨率 @ ±10V(自动零位 1 mV 最大值) 通用规格 电气隔离 350 Vrms,通道到通道和通道到底盘 工作温度 经测试 -40 °C 至 +85 °C 振动 IEC 60068-2-6 IEC 60068-2-64
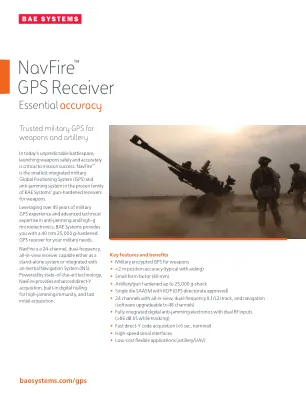
NavFire™ GPS 接收器 - BAE 系统
这款集成接收器提供完整的精确定位服务 (PPS) 精度。同时的 L1/L2 操作提供实时电离层校正,以进一步提高精度。其主要通信接口是高速 LVCMOS 串行端口。集成的抗干扰解决方案利用双元件数字零位来提高抗干扰能力。此外,该系统具有超紧耦合(UTC)单元接口选项,可提高抗干扰性能和导航精度。
MIL-HDBK-759C - 深慢速轻松
1. 控制-显示关系................................................................................................................16 2. 刻度、指针位置和刻度编号替代方案...............................................................................26 3. 固定刻度方位角刻度盘.........................................................................................................................27 4. 形状和颜色编码示例.........................................................................................................................28 5. 圆形刻度盘显示的零位和指针移动.........................................................................................30 6. 对齐指针以便快速检查读数.........................................................................................................31 7. 弧形和直线刻度上的刻度标记、数字和指针的相对位置....................................................................................................32 8. 点阵字符和分段矩阵字符的选择....................................................................................................47 9. 数字光计数器阵列....................................................................................................................49 10. 鼓型计数器设计.........................................................................................................................52 11. 旋转旋钮分离.........................................................................................................................76 12. 钥匙锁安装标准.............................................................................................................

RocJ - 澳大利亚声学学会
Streit 和 Barrett 提出了另一种方法(参考文献17)。利用隐马尔可夫模型 (HMM),该模型最近在语音处理领域得到广泛应用。在这种方法中,允许音轨漫游的频率范围(或门)被划分为有限数量的频率单元,每个单元与马尔可夫链的状态相关联。在 Streit 和 Barrett 的原始作品中,每个单元与一个 FFT 频率单元相重合,但这种限制是不必要的。此外,还包括一个零位,以允许音轨在允许的频率范围之外漫游或完全终止的可能性。有关频率波动可能程度以及轨迹开始或终止概率的统计信息通过隐马尔可夫模型的矩阵输入传达给跟踪器。

量子极值表面处方的领先阶修正
摘要:我们表明,量子极值表面 (QES) 处方的简单应用会导致矛盾的结果,必须在领先阶上进行校正。当存在第二个 QES(领先阶的广义熵严格大于最小 QES)并且两个表面之间存在大量高度不可压缩的体积熵时,就会出现校正。我们将校正的来源追溯到 QES 处方的复制技巧推导中使用的假设失败,并表明更仔细的推导可以正确计算校正。使用一次性量子香农理论(平滑最小和最大熵)的工具,我们将这些结果推广到一组确定 QES 处方是否成立的精炼条件。我们发现了对纠缠楔重构(EWR)所需条件的类似改进,并展示了如何将 EWR 重新解释为一次性量子态合并(使用零位而不是经典位)的任务,重力能够以最佳效率实现这项任务。