XiaoMi-AI文件搜索系统
World File Search System零点

RMBS Green Belém No.1 - 全球网络
抵押贷款支持票据的利息将于 2020 年 9 月 21 日按季度支付,此后将于每年三月、六月、九月和十二月的第 20 天(第二十天)按季度支付(或者,如果该日不是营业日,则为下一个营业日)。对于截至最终法定到期日的每个计息期,抵押贷款支持证券将按照欧元银行同业拆借利率 (EURIBOR) 计息,适用于三个月期欧元存款;或者,对于第一个计息期,从交割日至 2020 年 9 月 21 日(第二十一日)(但不包括该日),则按照三至六个月期欧元存款的 EURIBOR 插值利率计息;对于 A 级证券,从交割日至增级日(包括该日)期间,加收每年 0.55%(百分之零点五十五)的利差,在增级日之后(不包括该日)至最终法定到期日,加收每年 0.83%(百分之零点八十三)的利差;对于 B 级证券,从交割日至增级日(包括该日)期间,加收每年 0.67%(百分之零点六十五)的利差。递增日,年利率为 0.75%(百分之零点五),递增日之后(不包括递增日)至最终法定到期日,年利率为 1.13%(百分之一点十三)。自交割日至最终法定到期日,C 级债券将按三个月欧元存款的 EURIBOR 计息,外加每年 2.7%(百分之二点七)的利率,并有权获得 C 级分配金额(如有),但以可用资金为限,并受本文所述相关支付优先权的约束。
数字气压计用户手册 - GearFX
开/关 按下此按钮可打开气压表。设备快速进行自我测试,当这些测试成功完成后,系统开始测量。再次按下此按钮可关闭设备。气压表关闭时,它会短暂显示其版本号。气压表具有 10 分钟自动关闭功能。如果 10 分钟内压力没有变化或没有按下任何键,气压表将自动关闭。背光 按下此键可打开和关闭背光。ZERO 指示气压表显示零压力。如果在气压表有压力的情况下按下 ZERO,则该压力变为零状态。当移除此压力时,将显示负压,直到设备再次归零。仪表包含一项称为自动零点跟踪 (AZT) 的功能,可纠正正常运行期间的轻微零点变化。如果缓慢增加小压力,气压表可以将其归零。

数学 III - 课程框架 (加州教育部)
在数学 III 中,学生了解多项式系统和整数系统之间的结构相似性。学生利用多项式算术和十进制计算之间的类比,重点关注运算性质,特别是分配性质。他们将多项式乘法与多位整数乘法联系起来,将多项式除法与整数长除法联系起来。学生识别多项式的零点,并将多项式的零点与多项式方程的解联系起来。他们对多项式表达式的研究最终以代数基本定理结束。有理数通过允许除 0 之外的所有数字来扩展整数的算术。类似地,有理表达式通过允许除零多项式之外的所有多项式来扩展多项式的算术。使用有理表达式的一个中心主题是,有理表达式的算术受制于与有理数算术相同的规则。
航天级、100krad、100V、高侧电流感应电路 (Rev. A)
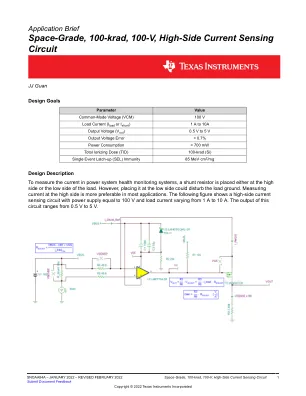
• PMOS 选择 1. PMOS 的阈值电压 |V th | 的绝对值需要足够小,以便运算放大器能够打开和关闭 PMOS 栅极。 2. PMOS 的零栅极电压漏极电流 (I DSS ) 定义栅极电压等于 V bus 时的漏电流。I DSS 设置较低的 V out 范围。 3. 如果从运算放大器输出 (V o ) 到栅极的线路电阻过大,则 PMOS 栅极电容会影响稳定性。此电容在 1/ ꞵ 曲线中增加了一个零点。如果零点位于 1/ ꞵ 和 Aol 截距点的左侧,相位裕度会减小。因此,最好使用小的栅极电容。 4. 根据军用标准,漏极-源极击穿电压必须是 V bus 的两倍,至少需要 200V 的击穿电压。
射频集成电路 - 视频课程
讲座 15:使用开路时间常数估计带宽 讲座 16:使用短路时间常数估计带宽 讲座 17:上升时间、延迟和带宽 讲座 18:零点增强带宽 讲座 19:并联放大器、调谐放大器 讲座 20:级联放大器

从运动模糊图像中识别模糊参数
点物体模糊图像的模糊程度 恢复原始图像中相对运动模糊的图像的问题。提取相机和物体场景之间的运动模糊程度对于大量应用中的运动模糊识别具有重要意义。这里提出的解决方案是PSF。Cannon [1] 处理了均匀线性的情况,确定了表征运动模糊的重要参数,该参数由方脉冲PSF和模糊的点扩展函数(PSF)描述,仅给出模糊在谱域图像本身中利用其周期性零点的性质。这种识别方法基于模糊图像的概念。这些零点被强调,因为沿运动方向的图像特征是倒谱域的,并且模糊程度的估计不同于其他方向的特征。取决于测量零点之间的间隔。关于 PSF 形状、谱域中零点的均匀性和平滑性的假设不满足,模糊图像在运动方向上的零点间距大于在其他方向上的零点间距。此外,在这个方向上存在各种运动退化的情况,例如加速原始未模糊运动 [2, 3] 和低频振动 [4]。物体。通过过滤模糊图像,我们强调 PSF 特性,而忽略图像特性。这里提出的是最大似然图像和模糊识别方法 [5–7]。这些方法对原始图像、模糊的PSF进行建模,并评估其形状,这取决于模糊和噪声过程。原始图像被修改为二维自回归(AR)过程,PSF参数允许快速高分辨率恢复模糊图像。 1997 Academic Press 具有有限脉冲响应。最大似然估计用于识别图像和模糊参数。模糊模型参数的识别被纳入恢复算法并重新进行模糊图像的恢复。介绍 模糊模型参数的识别被纳入恢复算法并重新进行模糊图像的恢复。介绍 模糊模型参数的识别被纳入恢复算法并重新进行模糊图像的恢复。1.介绍 模糊模型参数的识别被纳入恢复算法并重新进行模糊图像的恢复。成像系统的一个难题是性能下降需要大量计算。由运动引起的图像。当 Savakis 和 Trussell [8] 提出另一种模糊识别方法时,这个问题很常见。使用对原始图像平面的估计,即使相机由人手握住。功率谱(期望值),PSF 估计为 ,通常基于有关恢复残差功率和退化过程之间最佳匹配的信息的准确性。给定理想图像 f (x, y),相应的候选 PSF 与真实 PSF 相似。分级图像 g (x, y) 通常建模为 在本文中,我们开发了一种从运动模糊图像本身识别模糊参数的新方法。g ( x , y ) � � � h ( x � x � , y � y � ) f ( x � , y � ) dx � dy � � n ( x , y ) 根据对运动模糊对图像影响的研究,从模糊图像中提取方向、程度 (1) 和形状估计等模糊特征。虽然模糊识别的动机通常是其中 h ( x , y ) 是线性平移不变 PSF(点扩散图像恢复,这里提出的方法不起作用)和 n ( x , y ) 是随机噪声。将识别过程与恢复过程联系起来。在运动模糊图像中,模糊程度参数是该方法解决一维模糊类型,这在运动退化的情况下很常见。模糊 1 电子邮件:itzik@newton.bgu.ac.il。2 电子邮件:kopeika@bguee.bgu.ac.il。效果被认为是线性的和空间不变的,并且

APG-1 食人鱼压力表
主动温度补偿和校准提供超稳定的零点,从而实现可靠、宽动态范围 - 它还消除了用户频繁重新调零的需要,因为传统皮拉尼和对流压力计通常存在零点漂移。主动温度补偿还可以补偿环境温度波动引起的测量信号误差。
数字气压计用户手册 - JEGS
开/关 按下此按钮可打开气压表。设备快速进行自我测试,当这些测试成功完成后,系统开始测量。再次按下此按钮可关闭设备。气压表关闭时,会短暂显示其版本号。气压表具有 10 分钟自动关闭功能。如果 10 分钟内压力没有变化或没有按下任何键,气压表将自动关闭。背光 按下此键可打开和关闭背光。显示分辨率 显示分辨率可以显示 0.1 PSI 或 0.01 PSI。要在两种设置之间切换,请按住背光键 3 秒钟。这将切换显示并保存设置,直到用户再次更改。ZERO 指示气压计显示零压力。如果在气压计上施加压力时按下 ZERO,则该压力变为零压力。当移除该压力时,将显示负压,直到设备再次归零。气压计包含一项称为自动零点跟踪 (AZT) 的功能,可纠正正常运行期间的轻微零点变化。如果增加小压力

下一代 FWA 技术入门
形成波束和零点................................................................................................................................9 MIMO 和空间复用.................................................................................................................11 多输入多输出 (MIMO)................................................................................................11 分布式大规模 MIMO (DMM).................................................................................................12 多用户分布式大规模 MIMO (MU-DMM).......................................................................13 NLoS 性能....................................................................................................................................14 干扰消除....................................................................................................................................15 自干扰....................................................................................................................................16 突发干扰....................................................................................................................................17 信道中的动态运动....................................................................................................................18 对称性能....................................................................................................................................18