XiaoMi-AI文件搜索系统
World File Search System雷达
技术雷达
在这一期的 Radar 中,我们讨论了几个主题(其中一些最终未能入选),在这些主题中,团队正在使用工具来适应 Kafka。其中一些工具允许使用更传统的 Kafka 接口(例如 ksqlDB、Confluent Kafka REST Proxy 和 Nakadi),而其他一些工具则旨在提供额外的服务,例如 GUI 前端和业务流程插件。我们怀疑,工具如此丰富的部分根本原因是 Kafka 某些部分的潜在复杂性,以及需要将其适应现有架构和流程的组织中越来越普遍的存在。一些团队最终将 Kafka 视为下一代企业服务总线——“便利的滑坡”主题的一个例子——但其他团队使用 Kafka 来提供对发生的业务事件的通用访问。这些组织认识到,有时更容易拥有一个在边缘进行适应的集中式基础设施,并尝试通过精心的设计和治理来避免蔓延。无论如何,它表明 Kafka 继续朝着批量异步发布/订阅消息传递的事实标准的方向发展。

SETA 安全雷达
俄罗斯 2022 年对乌克兰的干预震惊了国际社会。那次事件并不仅限于军事干预。它影响了全球体系,并表明冷战后的现状已不可持续。与此同时,乌克兰局势加速了大国竞争的复苏。从这场地缘政治冲击中可以得出的另一个结论是,欧洲安全并不是一个既定和完成的问题。毕竟,俄罗斯对乌克兰的干预证实了俄罗斯对欧洲构成了传统的军事威胁(正如我们在北约 2022 年战略概念中所看到的那样),考虑到欧洲的安全和防御架构,欧洲与俄罗斯的关系将走向何方仍不清楚。与此同时,俄乌战争超越了这些问题,由于能源价格上涨,加剧了源于冠状病毒大流行的经济脆弱性。在这方面,欧洲将在今年冬天面临重大挑战。此外,俄乌战争加剧了粮食危机(在所有上述危机之上),并揭示了全球粮食链的脆弱性。2022 年,土耳其发现自己处于所有这些问题的中心,包括大国竞争的复苏、能源危机、日益加深的经济危机和粮食危机。例如,该国多次试图在俄罗斯和乌克兰之间进行调解,最终在囚犯交换和粮食交易中发挥了关键作用。这些努力使土耳其与西方建立了一种新型关系。近几个月来,安卡拉为解决

自动雷达成像系统
大型语言模型 (LLM) 显著推动了自然语言处理 (NLP) 领域的发展,使从文本生成到问答等应用成为可能。然而,优化动态外部信息的集成仍然具有挑战性。检索增强生成 (RAG) 技术通过将外部知识源纳入生成过程来解决这一问题,从而增强 LLM 输出的上下文相关性和准确性。虽然 RAG 已被证明是成功的,但选择单个 RAG 技术的过程通常不是自动化的或优化的,从而限制了该技术的潜力和可扩展性。缺乏系统自动化会导致效率低下并阻碍对 RAG 配置的全面探索,从而导致性能不佳。AutoRAG 旨在通过引入一个自动化框架来弥补这一差距,该框架系统地评估管道不同阶段的众多 RAG 设置。AutoRAG 通过大量实验优化 RAG 技术的选择,类似于传统机器学习中的 AutoML 实践。这种方法简化了评估流程并提高了 RAG 系统的性能和可扩展性,从而能够更高效、有效地将外部知识集成到 LLM 输出中。
SETA 安全雷达
2022 年俄罗斯对乌克兰的干预震惊了国际社会。这一事件不仅限于军事干预。它影响了全球体系,并表明冷战后的现状已不再可持续。与此同时,乌克兰局势加速了大国竞争的复苏。从这一地缘政治冲击中可以得出的另一个结论是,欧洲安全不是一个既定的、已完成的问题。毕竟,俄罗斯对乌克兰的干预证实了俄罗斯对欧洲构成了传统的军事威胁(正如我们在北约 2022 年战略概念中所看到的那样),考虑到欧洲的安全和防御架构,欧洲与俄罗斯的关系将朝哪个方向发展仍不清楚。与此同时,俄乌战争超越了这些问题,加剧了因能源价格上涨而导致的冠状病毒大流行造成的经济脆弱性。在这方面,欧洲将在今年冬天面临重大挑战。此外,俄乌战争加剧了粮食危机(除上述所有危机外),并揭示了全球粮食链的脆弱性。2022 年,土耳其发现自己处于所有这些问题的中心,包括大国竞争的复苏、能源危机、不断加深的经济危机和粮食危机。例如,该国曾多次试图在俄罗斯和乌克兰之间进行调解,最终在国际上发挥了关键作用。

英国雷达评论
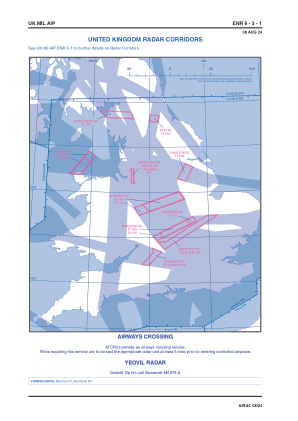
正如 RADAR 82 所证实的,英国的雷达行业非常活跃,但雷达的发展与美国并不完全一致。这部分是因为不同的运营需求和不同的市场条件,部分是因为当地的时尚和创新的偶然性。大多数大型电子公司都有专门负责雷达一个或多个方面的部门。随着雷达界在华盛顿特区举行的国际雷达会议上标志着本世纪技术的进步,有人建议在这些交易中发表对英国雷达技术的回顾。因此,我们准备了这篇混合评论,我们希望它能激发您的兴趣并提供参考来源。在该项目开始时,我们意识到,可能被宽泛地描述为雷达的努力领域非常广泛,以至于必须应用许多限制。已省略 300 GHz 以上的雷达,因此不包括激光雷达和激光测距仪。为了节省页面预算,还省略了二次雷达、仪表雷达和一些无线电导航辅助设备(高度计、多普勒导航仪),以及雷达数据处理器。HF 雷达的内容很少。最后,组件技术被认为通常不在本评论的范围内。本评论非常简单地分为地面雷达、海军/海洋雷达、机载雷达、导引头和大学计划等领域,并按此顺序介绍。由于多种原因,尽管在机载雷达部分已经在这方面进行了认真的尝试,但无法在整篇论文中进行全面的处理。此次审查的准备工作因安全限制而受到阻碍,这反映在许多领域无法获得技术细节。
测距仪雷达升级和...
结合我们经过实地验证的 VME 主机技术与最近开发的 VME 子系统技术,我们能够推出一种更高效、更全面、更经济的方法来升级常用的仪表级雷达系统。VME 升级将现有硬件替换为新的最先进的基于 VME 的计算机、磁盘驱动器、串行接口、操作员通信计算机 (OPCOM) 和特定的 VME 接口卡,以模拟现有的总线控制器。从主机 VME 计算机升级开始,BAE Systems 提供了一个扩展基础平台,以满足长期需求。利用商用现货 (COTS) 板和“C”语言,可以轻松维护和升级新计算机系统。这条新产品线专为 RIR 系列基于计算机的仪表雷达系统的电子子系统升级而量身定制。