XiaoMi-AI文件搜索系统
World File Search System非机动


动态管理超机动目标的跟踪资源
新一代雷达正面临着越来越危险的目标。这些雷达需要同时执行多项任务,包括监视和跟踪。为此,它们可以配备凝视天线,这样它们就可以克服天线旋转引起的限制。因此,必须升级雷达的跟踪功能,以应对跟踪高机动目标和管理资源以平衡任务间时间的双重问题。在此背景下,本论文研究了跟踪高机动目标的新方法。提出了一种基于固有坐标进行目标跟踪的新目标模型。这种新的目标模型在目标本身的框架中表示,并使用 Frenet-Serret 框架,该框架非常适合描述涉及远大于地球重力的法向加速度的高动态机动。开发了一种使用目标模型的特殊固有公式的滤波算法。这种滤波算法在实现方面与扩展卡尔曼滤波器非常相似,并且是使用真实数据实现的。与标准目标模型和过滤算法的比较表明,在大量轨迹上,该方法比简单模型和算法有所改进。还开发了一种新的估计方法,该方法依赖于平滑方法的最小二乘公式,并考虑了轨迹中的运动跳跃。该方法还显示出改进
陆地机动维护机械师 F/M
武装部队部负责保护法国领土、人口和利益。它还参与公共服务任务。为了执行任务,除了军队之外,武装部队部还在法国和国外雇用了 60,000 多名文职人员。民事特工将他们的技术或管理技能运用到高风险任务中!成为国防文职人员:通过签订定期或永久合同加入武装部队,为更安全的世界做出贡献!第十二装备保障基地是一个专门负责维护和修理陆军装备的陆军组织。卢瓦雷省的 Gien 分队专门负责维护装甲系列车辆和 Genie 系列车辆(利勃海尔起重机、中型叉车)的状况。

机动航空和火力综合应用 (MAFIA)
未来展望 MAFIA 软件将过渡到 PEO C3T 记录计划的精确火力-徒步和精确火力-骑乘,使 MAFIA 成为每个旅战斗队中所有徒步和骑乘火力支援应用的 POR 系统,以及陆军中最普及的 C2 系统。如今,MAFIA 科学技术基线拥有超过 23 个联合和政府过渡合作伙伴,拥有支持所有五个服务部门的全套多领域能力。

机场电站应急发电机维护及检查服务
截止日期前 4 天 - 成功的竞标者将是团队设定的估计价格范围内提供最低出价的竞标者。但是,如果投标价格在预算、结算和会计命令(1949 年帝国法令第 165 号)第 85 条范围内...

2023-2024 年冬季 - 美国陆军机动卓越中心
2 专业论坛 2 斯特赖克旅的作战方式以及 SBCT 在军和师编队中的部署 中校(退役)Bill Koziar 6 快速而平坦的战斗:在中队及以下使用“安全但非机密加密”网络进行 C2 迈克尔·R·尼尔森少校和 Pete Erickson 中校 9 步兵对领导力的反思 杰夫·法默中校 14 评估:作战过程中最困难的部分 迈克尔·A·汉密尔顿中校 18 对步兵技术员的必要性 一级士官长 Christian H. Nooney 19 空降机械化突袭:俄罗斯概念 Lester W. Grau 博士和 Charles K. Bartles 25 描述俄罗斯步兵的突破和清除技术 Lester W. Grau 博士和 Charles K. Bartles 博士 30 释放火力和怒火:TOS-1A 在俄乌战争中的影响 Jorge L. Rivero
2023 年秋季 - 美国陆军机动卓越中心
2 丛林作战 2 简介 MG Joseph A. Ryan 4 JOTC 在丛林环境中训练士兵战斗的关键作用 CPT Mac Lalor 7 丛林是中立的:丛林学校的四名律师 COL Chris Martin、MAJ Will Rothstein、MAJ Nick Allen 和 CPT Cody Waagner 10 丛林中的火力支援 COL Joseph Katz、MAJ Ryan Yamauchi、1LT David J. Block 和 1LT Ruvi Sirmans 15 IBCT 分布式指挥和控制:我指挥的地方不是我控制的地方 COL Graham R. White、MAJ Justin E. James 和 MAJ Richard Eaton 20 丛林医学课程为严酷的 LTC Brandon 提供培训Grooms、Kaitlin Harper 博士 (MAJ)、Kyle Mogensen 上士和 Waylon K. Wren 上士 24 在丛林环境中延长作战范围 Wells Rugeley 上士 28 闪电实验室:创新与实验 Jason Hinds 少校、Mahdi Al-Husseini 上士、Emiliano Concha-Toro 中尉和 Coral Marquez 中尉

IAC–22–C1.6.2 自适应闭环机动规划...
摘要 自主性是未来太空任务中越来越重要的组成部分,新技术对于应对可能对任务成功构成风险的机载异常事件是必不可少的。在寻找一个令人满意的机动计划来纠正意外事件时,对于地月空间的机载低推力任务应用来说,初步确定合适的收敛域仍然具有挑战性。这项研究通过展示人工神经网络作为估计传统迭代制导和控制方法的准确启动解决方案的有前途的工具来解决这一挑战,从而产生了一个强大的“混合”架构,该架构同时受益于神经网络的计算简单性和目标方案的稳健性,以满足准确性要求并确保任务成功。在这个范例中,差分校正直接纳入强化学习过程,任务是让生成的神经网络控制器进行轨迹恢复的初始猜测识别。在“失控”航天器场景中演示了快速低推力机动规划,其中随着时间的推移,偏离计划的近直线光环轨道路径导致定位无效,并且需要采用替代方法来确定有效的恢复计划。关键词:航天器自主性、强化学习、低推力、地月空间、神经网络控制
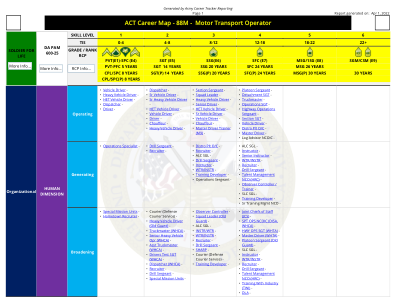
ACT 职业地图 - 88M - 机动车运输运营商
AR 600-81 • 第一年接触点 • 年度 IDP 更新 • 年度 IDP 更新 • 年度 IDP 更新 • 年度 IDP 更新 • 年度 IDP 更新 • 年度 IDP 更新 • 年度预算更新 • 年度预算更新 • 年度预算更新 • 年度预算更新 • 年度预算更新 • 年度预算更新服务阶段 • 重新入伍接触点 • 重新入伍接触点 • 重新入伍接触点 1+ 年 • MOS 交叉检验 • MOS 交叉检验 • MOS 交叉检验 • GAP 分析 • GAP 分析 • GAP 分析 • 自我评估 • 自我评估 • 自我评估