XiaoMi-AI文件搜索系统
World File Search System预缩

期刊预校样
简介和目标:非酒精性脂肪性肝病 (NAFLD) 是导致持续性慢性肝病的主要原因,而慢性肝病会引发心血管疾病、恶性肿瘤和相关死亡。红细胞 (RBC) 指数与 NAFLD 发病率之间存在关联,但其因果关系尚未确定。我们旨在通过前瞻性和孟德尔随机化 (MR) 分析来调查这种关联。材料和方法:这项前瞻性研究涉及来自英国生物银行的 237,016 名参与者。我们采用 Cox 比例风险模型和限制性三次样条模型来评估 RBC 指数与 NAFLD 之间的关联,并使用双样本 MR 分析来确定任何因果关系。结果:在平均 8.64 年的随访中,来自英国生物银行的 2,894 名参与者患上了 NAFLD。这项前瞻性研究表明,高水平血红蛋白 (HGB)(风险比 [HR],1.41;95% 置信区间 [CI] 1.24 − 1.60;P < 0.001)和红细胞计数 (HR,1.20;95% CI,1.07 − 1.36;P = 0.003) 与 NAFLD 风险增加之间存在显著关联。MR 分析表明高 HGB 水平与 NAFLD 风险之间存在因果关系(比值比 [OR],1.55;95% CI,1.11 − 2.18;P = 0.010)。然而,没有观察到红细胞计数和 NAFLD 之间的因果关系。结论:这项前瞻性和 MR 分析显示 HGB 水平与 NAFLD 之间存在正向因果关系。 HGB可以预测NAFLD的风险,有望成为一种大规模、非侵入性工具,动态监测NAFLD的发生发展。© 2025 Fundación Clínica Médica Sur, AC 由 Elsevier España, SLU 出版本文为 CC BY-NC-ND 许可下的开放获取文章( http://creativecommons.org/licenses/by-nc-nd/4.0/ )


中文- 如何使用MDB-RS232® 测试纸币找零器
( 读取回来的数值标识哪种类型的纸币是在接收币后进入找零器 ) 这样我们知道哪种纸币在找零器中,能用于后续的找零 3703 回复 : 00 04 04 ( 这意味着类型 2 纸币是预设置进入找零器 : 00000000 00000100) 回复 : 00 01 01 ( 这意味着类型 0 纸币是预设置进入找零器 : 00000000 00000001) 如果回复的是其它数值,可以对应转换为 2 进制数值,对应货币通道去理解 3.使能找零器

在人工智能时代将缩放到1,000层3D NAND -MEDISEROMER
3D NAND垂直堆栈缩放缩放量主要是在膜沉积和蚀刻方面引起的挑战,这与设备通过功能尺寸减小进行缩放不同。与图案,隔离并连接垂直集成的3D存储器设备,需要难以高纵横比(HAR)蚀刻。通常将孔或沟槽的纵横比定义为深度与孔或沟槽宽度的比率。3D NAND制造中的关键过程包括替代堆栈膜沉积,高纵横比蚀刻和文字线金属化。找到位密度,读写速度,功率,可靠性和成本之间的平衡对于应用至关重要。当我们在结构中添加更多层,并且还有额外的资本支出,随着层的数量增加,增加更多的存储容量变得越来越昂贵。
Fezolinetant 用于治疗中度至重度血管舒缩症状......
临床和经济评论研究所 (ICER) 是一个独立的非营利性研究组织,负责评估医学证据并召集公共审议机构,帮助利益相关者解释和应用证据,以改善患者治疗效果和控制成本。通过所有工作,ICER 寻求帮助创造一个未来,在那里,将证据付诸行动的合作努力为更有效、更高效和更公正的医疗保健系统奠定基础。有关 ICER 的更多信息,请访问 https://icer.org/。本报告的资金来自政府拨款和非营利基金会,其中最大的单一资助者是 Arnold Ventures。这项工作没有来自健康保险公司、药房福利管理者或生命科学公司的资金。ICER 从这些医疗行业组织获得其总收入的约 24% 来运行单独的政策峰会计划,资金大约平均分配给保险公司/PBM 和生命科学公司。没有与此评论相关的生命科学公司参与此计划。有关资助者的完整列表以及有关 ICER 支持的更多信息,请访问 https://icer.org/who-we-are/independent-funding/ 。对于药物主题,除了接受公众的建议外,ICER 还会查看公开可用的信息,并与 IPD Analytics 合作,后者是一个独立组织,为包括付款人、制药商、供应商和批发商在内的多样化行业利益相关者执行新兴药物管道分析。IPD 会免费为 ICER 提供关于药物管道的定制报告,但不会优先考虑特定 ICER 评估的主题。关于中西部 CEPAC

将扩散模型缩放到现实世界3D激光雷达场景完成
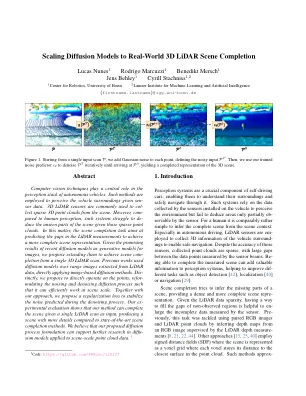
计算机视觉技术在自动驾驶汽车的感知堆栈中起着核心作用。使用此类方法来感知给定数据的车辆周围环境。3D激光雷达传感器通常用于从场景中收集稀疏的3D点云。然而,根据人类的看法,这种系统努力鉴于那些稀疏的点云,因此很难塑造现场的看不见的部分。在此问题中,场景完成任务旨在预测LiDAR测量中的差距,以实现更完整的场景表示。鉴于最近扩散模型作为图像的生成模型的有希望的结果,我们建议将其扩展以实现单个3D LIDAR扫描的场景。以前的作品使用了从LiDAR数据提取的范围图像上使用扩散模型,直接应用了基于图像的扩散方法。差不多,我们建议直接在这些点上操作,并介绍尖锐的和降解的扩散过程,以便它可以在场景规模上有效地工作。与我们的方法一起,我们提出了正规化损失,以稳定在denoising过程中预测的噪声。我们的实验评估表明,我们的方法可以在单个LIDAR扫描中完成场景,作为输入,与最新场景完成方法相比,产生了更多详细信息的场景。我们认为,我们提出的扩散过程公式可以支持应用于场景尺度点云数据的扩散模型中的进一步研究。1
将扩散模型缩放到现实世界3D激光雷达场景完成
计算机视觉技术在自动驾驶汽车的感知堆栈中起着核心作用。使用此类方法来感知给定数据的车辆周围环境。3D激光雷达传感器通常用于从场景中收集稀疏的3D点云。然而,根据人类的看法,这种系统努力鉴于那些稀疏的点云,因此很难塑造现场的看不见的部分。在此问题中,场景完成任务旨在预测LiDAR测量中的差距,以实现更完整的场景表示。鉴于最近扩散模型作为图像的生成模型的有希望的结果,我们建议将其扩展以实现单个3D LIDAR扫描的场景。以前的作品使用了从LiDAR数据提取的范围图像上使用扩散模型,直接应用了基于图像的扩散方法。差不多,我们建议直接在这些点上操作,并介绍尖锐的和降解的扩散过程,以便它可以在场景规模上有效地工作。与我们的方法一起,我们提出了正规化损失,以稳定在denoising过程中预测的噪声。我们的实验评估表明,我们的方法可以在单个LIDAR扫描中完成场景,作为输入,与最新场景完成方法相比,产生了更多详细信息的场景。我们认为,我们提出的扩散过程公式可以支持应用于场景尺度点云数据的扩散模型中的进一步研究。1

材料科学与工程 – 预微积分
数学 AP 微积分 AB 成绩为 3:MATH 1710 AP 微积分 BC 成绩为 3:MATH 1710、1720 AP 微积分 AB BC 考试成绩为 3:MATH 1710 IB 数学 - 微积分:MATH 1710 CLEP 大学代数:MATH 1100 CLEP 预科微积分:MATH 1650 CLEP 微积分:MATH 1710 社区学院 MATH 1314:MATH 1100 社区学院 MATH 1414:MATH 1100 社区学院 MATH 1442:MATH 1680 社区学院 MATH 2312:MATH 1650 社区学院 MATH 2412:MATH 1650 社区学院 MATH 2313:MATH 1710 社区学院 MATH 2314:MATH 1720 社区学院 MATH 2315:MATH 2730 社区学院 MATH 2320:MATH 3410 的替代课程 社区学院 MATH 2413:MATH 1710 社区学院 MATH 2414:MATH 1720 社区学院 MATH 2415:MATH 2730 社区学院 MATH 2420:MATH 3410 的替代课程

展示半自动化预的有效性...
最近的研究表明,适当的手动清洁内窥镜可减少 4-6 LOGS 或 99.99% 的微生物数量和有机负荷 (Puri 2017),这凸显了彻底的预清洁的重要性。只有通过适当的预清洁过程才能达到高水平消毒,因为这可以防止生物膜的形成。虽然预清洁过程只需要很短的时间,但它在内窥镜再处理中的重要性至关重要。如果仪器不干净,那么它肯定无法达到无菌状态。然而,其他一些研究表明,目前的再处理和过程控制程序往往不够充分和安全。最近的研究表明,其中一个主要原因是员工教育不足。(Knight 201X)可以肯定地说,当前的时间问题和缺乏正确的知识导致了当前与内窥镜感染有关的问题。手动清洁通常很有效,但在实践中难以控制。