XiaoMi-AI文件搜索系统
World File Search System领头

神经生产网络:人工智能的基础设施地理
摘要 人们普遍认为,少数几家科技公司拥有支撑人工神经网络普及的基础设施。但人们对这种计算资源的集中如何在新的生产地理中体现知之甚少。为了解决这一差异,本文介绍了神经生产网络的理论框架:由人工神经网络驱动的地理上分散但计算上封闭的生产安排。本文通过探讨亚马逊、谷歌和微软作为神经生产网络领头企业的作用来证实这一框架。通过重新审视生产网络学术研究的三个关键类别——价值、嵌入性和权力——以这些领头企业为背景,本文为人工神经网络的经济地理研究开辟了空间。

对美国战俘/失踪人员政策的审查
大约下午 3 点(1991 年 1 月 30 日),车队驶过 Khafji 以北的一辆沙特 M-60 坦克,这辆坦克最近在战斗中遭受了严重损坏,部分堵塞了道路。第二辆 HET 的乘客随后听到两声爆炸声和碎片撞击车辆的声音,发现他们认为是敌军在通往城镇的拱门附近,于是立即沿路调头。此时他们估计自己落后领头车辆 100-150 米,领头车辆继续向北行驶。转弯后,车组回头看到另一辆 HET [由 Rathbun-Nealy 和 Lockett 驾驶] 试图掉头,但被卡住了。当敌军靠近时,Melissa 和 SPC Lockett 被发现仍坐在车里。没有迹象表明他们试图还击或逃跑。

可再生能源最佳实践行业状况
爆炸性动力工具 ................................................................................................................................ 97 烟雾 ................................................................................................................................................ 97 热加工 ................................................................................................................................................ 98 绝缘 ................................................................................................................................................ 98 梯子作业 ............................................................................................................................................. 98 激光安全员津贴 ............................................................................................................................. 98 铅燃烧 ............................................................................................................................................. 98 领头手 ............................................................................................................................................. 98 脚手架工人执照或证书 ............................................................................................................. 98 服务芯 ............................................................................................................................................. 98 服务工作 ............................................................................................................................................. 99 工具津贴 ............................................................................................................................................. 99 有毒物质 ............................................................................................................................................. 99焊接资格................................................................................................................................ 99 员工车辆的使用...................................................................................................................... 99

车辆跟驰算法的建模与分析对燃油经济性的改善
通讯作者:Ozgenur Kavas-Torris(电子邮件:kavastorris.1@osu.edu)摘要地面车辆的连通性使车辆能够彼此共享关键车辆数据,例如车辆加速度。另一方面,使用摄像头、雷达和激光雷达等传感器,可以检测到领头车辆和主车辆之间的车内距离以及相对速度。协作自适应巡航控制 (CACC) 以地面车辆连通性和传感器信息为基础,形成具有自动跟车功能的车队。CACC 还可用于提高车队中车辆的燃油经济性和移动性能。本文介绍了 3 种用于提高 CAV 燃油经济性的跟车算法。设计了一种自适应巡航控制 (ACC) 算法作为比较的基准模型。设计了一种协作自适应巡航控制 (CACC),它使用通过 V2V 接收到的领头车辆加速度进行跟车。开发了一种生态合作式自适应巡航控制 (Eco-CACC) 模型,将前车的不稳定加速度视为需要减弱的干扰。设计了一种高级 (HL) 控制器,用于在前车驾驶员不稳定时进行决策。运行模型在环 (MIL) 和硬件在环 (HIL) 仿真,以测试这些跟车算法的燃油经济性性能。结果表明,当前车不稳定时,HL 控制器能够通过使用 CACC 和 Eco-CACC 获得平滑的速度曲线,并且比 ACC 控制器消耗更少的燃料。关键词:跟车;自适应巡航控制 (ACC);合作式自适应巡航控制 (CACC);生态合作式自适应巡航控制 (Eco-CACC);燃油经济性。

新闻稿_2024 年亚洲旅游科技展创下最高展览面积销售纪录并推出令人惊叹的领头羊系列演讲者
2024 亚洲旅游科技展与亚洲国际旅游交易会和亚洲会展展览会同期举办,将于 2024 年 10 月 23 日至 25 日在新加坡金沙会展中心举行。今年展会的展位面积已经超过去年,参展的旅游科技展商也越来越多。主要参展商包括 Hotelbeds、Agoda、Go Global Travel、TBO Holidays、韩国旅游创业中心、Juniper Travel Technology、Convergent International Travel、Travel Compositor、SiteMinder、DerbySoft、Archipelago International、11-Infotech System、同程旅游、Airalo、广东启游国际旅行社、Green Motion International、连连支付和易宝支付。此外,还有来自 Agoda、D-EDGE Hospitality Solutions、Sabre Corporation、Booking.com 和千禧酒店及度假村的顶级领头演讲嘉宾。
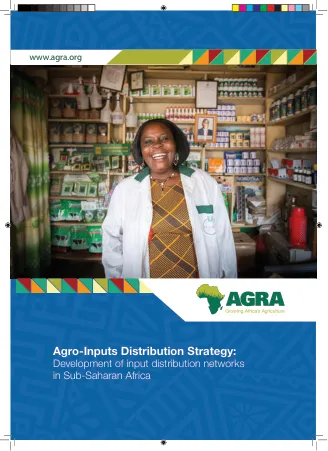
农业投入品分配策略:
AGRA 与少数专业服务提供商合作,寻找并培训潜在的农业经销商,这些经销商来自愿意进军农业投入品业务的现有贸易商,以及感兴趣的人群,其中包括领头农民、退休人员、教师和推广人员。基础培训包括业务管理、产品知识和使用安全。为了帮助他们开设店铺,AGRA 向他们提供了 200-500 美元的小额启动资金,用于购买店铺的基本基础设施,条件是贸易商提供配套资金购买种子库存。在某些情况下,AGRA 设立了信用担保基金,以利用商业银行贷款或供应商信贷,使农业经销商能够及时获得足够的库存。然后,农业经销商正式与农业投入品供应商建立联系,供应商很快意识到他们为他们的投入品(种子、肥料和作物保护产品)提供分销渠道的价值。因此,初创种子公司能够迅速将产品推向市场,而肥料供应商则能够进入新地区。
第 17 号 陆军总部第 ...
越共许多掩体的火力十分猛烈。该排多次试图对敌人进行机动,取得火力优势,但叛乱分子人数众多,友军被困在阵地上,伤亡惨重。尽管越共进攻十分猛烈,但领头部队两次反击敌人,挽回战场上的伤亡,然后撤退形成防御圈。随着倾盆大雨的到来,人数占优势的越共部队从四面八方逼近。友军排挖掘防御阵地,将伤员聚集到阵地中心。尽管伤亡人数不断增加,B 连、第 2 营、第 8 骑兵团、第 1 骑兵师(空中机动)的士兵们坚决抵挡叛乱分子的人海攻击,并给敌人造成了重大伤亡,直到 22:00 时另一个步枪连接替了他们的进攻。营级越共部队从未放松对该部队周边的攻击压力。由于弹药极少,士兵们已经在近距离战斗中上膛刺刀保卫自己的阵地,这时叛乱分子终于在另一个友军到来时脱离了接触。单位。B 连、第 2 营、第 8 骑兵团、第 1 骑兵师(空中机动)的士兵们表现出非凡的英雄主义和对职责的忠诚,这符合军队的最高传统,并为他们自己和美国陆军赢得了巨大的荣誉。
信号情报
1-1 情报周期 1-7 4-1 无线电营组织 4-2 4-2 SIGINT 支援单位要素 4-3 4-3 虚构的 SSU 飞行梯队配置 4-6 5-1 EA-6B 巡逻机 5-2 5-2 VMAQ 组织 5-2 5-3 VMAQ 和 TERPES 操作 5-3 6-1 虚构的 MEF SIGINT 操作架构 6-3 6-2 虚构的 MEF 领头梯队 SIGINT 操作架构 6-4 6-3 MEU(SOC) CE 海上 SIGINT 操作架构 6-5 6-4 MEU(SOC) CE 岸上 SIGINT 操作架构 6-6 6-5 MEF CE CIC 通信和信息系统架构 6-9 6-6 RadBn SSU 操作控制和分析中心通信和信息系统 6-10 6-7 VMAQ 操作中心和 TERPES 通信和信息系统 6-11 7-1 MAGTF 和支持 SIGINT 操作 7-13 B-1 AN/ULQ-19(V2) B-1 B-2 AN/MLQ-36 B-2 B-3 AN/MLQ-36A B-3 B-4 AN/PRD-12 B-4 B-5 AN/MSC-63A B-5 B-6 AN/MSC-63A(内部视图) B-5 B-7 技术控制和分析中心使用概念 B-6 B-8 团队便携式收集系统升级 B-8
信号情报 - Marines.mil
1-1 情报周期 1-7 4-1 无线电营组织 4-2 4-2 SIGINT 支援单位要素 4-3 4-3 虚构的 SSU 飞行梯队配置 4-6 5-1 EA-6B 巡逻机 5-2 5-2 VMAQ 组织 5-2 5-3 VMAQ 和 TERPES 操作 5-3 6-1 虚构的 MEF SIGINT 操作架构 6-3 6-2 虚构的 MEF 领头梯队 SIGINT 操作架构 6-4 6-3 MEU(SOC) CE 海上 SIGINT 操作架构 6-5 6-4 MEU(SOC) CE 岸上 SIGINT 操作架构 6-6 6-5 MEF CE CIC 通信和信息系统架构 6-9 6-6 RadBn SSU 操作控制和分析中心通信和信息系统 6-10 6-7 VMAQ 操作中心和 TERPES 通信和信息系统 6-11 7-1 MAGTF 和支持 SIGINT 操作 7-13 B-1 AN/ULQ-19(V2) B-1 B-2 AN/MLQ-36 B-2 B-3 AN/MLQ-36A B-3 B-4 AN/PRD-12 B-4 B-5 AN/MSC-63A B-5 B-6 AN/MSC-63A(内部视图) B-5 B-7 技术控制和分析中心使用概念 B-6 B-8 团队便携式收集系统升级 B-8

2023 年 8 月 13 日 - Final Frontier Flash
- YG-36(05) 位于该星座的典型轨道上,远地点约 505 公里,近地点约 491 公里,倾角 35°。随着 YG-36(05) 进入领先-尾随-尾随编队,这些数字将在未来几周内发生变化。-正如模式所料,YG-36(05) 与 YG-35 三重奏平面匹配,这次是 YG-35(04)。- 以下是其他配对:1) YG-36(01) 和 YG-35(01);2) YG-36(02) 和 YG-35(02);3) YG-36(03) 和 YG-35(05);4) YG-36(4) 和 YG-35(03)。 - 三颗卫星中的两颗由航天东方红卫星有限公司研制,第三颗由上海航天技术研究院 (SAST) 研制,这两颗卫星均隶属于中国航天科技集团公司。 (所有 YG-35 和 36 三重奏都是如此)。 - 中国官方媒体披露了有关这些卫星的少量细节。 该国新华社称,这些卫星将主要用于测试“新的对地观测技术”。 - 2018 年至 2020 年期间,中国发射了 8 颗具有相似轨道和编队的新五星卫星,轨道参数相似。 所有卫星的倾角均为 35°,高度在 460 - 475 千米之间。 - 遥感 35/36 卫星可能采用领尾配置运行,领头卫星可能会为两颗尾随卫星提供线索。