XiaoMi-AI文件搜索系统
World File Search System飞行高度

飞行高度对无人机测距精度的影响...
近年来,用于采矿业 3D 地形测绘的轻型无人机 (UAV) 得到了显著发展。特别是在露天矿等复杂地形中,海拔起伏剧烈,与传统方法相比,基于无人机的测绘已证明具有经济性和更高的安全性。然而,无人机测绘复杂地形的最重要因素之一是飞行高度,由于生成的 DEM 的安全性和准确性,需要认真考虑飞行高度。本文旨在评估飞行高度对露天矿生成的 DEM 准确性的影响。为此,研究区域选在越南北部一个地形复杂的采石场。调查采用 50 m、100 m、150 m、200 m 和 250 m 五个飞行高度进行。为了评估生成的 DEM 的精度,使用了 10 个地面控制点 (GCP) 和 385 个检查点,这些检查点通过 GNSS/RTK 和全站仪方法进行了测量。通过 X、Y、Z、XY 和 XYZ 分量的均方根误差 (RMSE) 来评估 DEM 的精度。结果表明,在飞行高度小于 150 m 时生成的 DEM 模型具有较高的精度。当飞行高度从 50 m 增加到 250 m 时,10 个 GCP 的垂直 (Z) 方向的 RMSE 从 1.8 cm 增加到 6.2 cm,水平 (XY) 方向的 RMSE 从 2.6 cm 增加到 6.3 cm,而 385 个检查点的垂直 (Z) 方向的 RMSE 从 0.05 m 逐渐增加到 0.15 m。

使用低成本 GNSS 测量的飞行高度精度……
摘要:飞行高度是校正机载测量期间测量的陆地放射性核素产生的伽马信号的基本参数。无人机辐射测量的前沿需要轻便而精确的高度计,飞行高度距离地面约 10 米。我们为飞机配备了七个高度传感器(三个低成本 GNSS 接收器、一个惯性测量单元、一个雷达高度计和两个气压计),并分析了在 (35–2194) 米高度范围内在海上收集的约 3 小时的数据。在低海拔(H < 70 m)下,雷达和气压高度计提供最佳性能,而 GNSS 数据仅用于气压计校准,因为它们受到来自海上的多径引起的大噪声的影响。50 m 高度的 ~1 m 中位标准偏差影响地面放射性同位素丰度的估计,不确定度小于 1.3%。GNSS 双差分后处理显著提高了 H > 80 m 的数据质量,包括高度中位标准偏差以及重建和测量的 GPS 天线距离之间的一致性。在 100 m 高度飞行时,由于飞行高度的不确定性,地面总活动的估计不确定性约为 2%。

鸟类能飞多高?方法和分析的发展......
前言 这项工作的目的是开发一种分析数字航空鸟类学调查数据的方法,以得出特定物种的飞行高度。这项工作的重点是开发一种分析方法,而不是分析综合数据集以得出通用的飞行高度值。尽管该项目已成功开发出这种分析方法,但 BTO 和这项工作的指导小组强调,本报告中提出的值并非旨在用于评估。任何进行鸟类碰撞风险评估的一方都应向相关监管机构和法定自然保护机构寻求有关适当的飞行高度值和避免率的建议。本报告不构成此类法定建议。
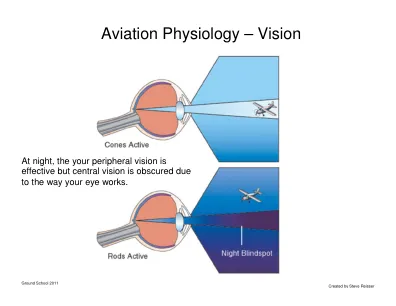
航空生理学 – 视觉
• 如果您或乘客潜水,请务必小心。潜水员的身体必须有足够的时间在飞行前排出潜水中积累的氮气。等待时间 飞行高度低于 8,000 英尺:潜水后无需控制上升至少等待 12 小时。潜水后需要控制上升至少等待 24 小时。飞行高度高于 8,000 英尺。任何水肺潜水后至少等待 24 小时。
地面控制站 (GCS) 设计方向分析
全球鹰是美国诺斯罗普·格鲁曼公司的产品。它配备了全天候合成孔径雷达(SAR)、电光/红外传感器(EO/IR)、运动目标指示器、高分辨率电光传感器、数码相机和第三代红外传感器。它的集成传感器设备通过一个相当于1.2米直径天线和超级计算机的通用信号处理器进行操作。一旦起飞,它可以飞行长达32小时。它的飞行高度不受恶劣天气和盛行风的影响。它的飞行高度超出了高射炮和大多数导弹的拦截范围。它通过专用无线电信道和卫星通信网络进行控制。表4说明了全球鹰的特点。


关注安全网 - SKYbrary
一半的 STCA 警报都是由于没有 C 模式数据的航迹而产生的干扰警报,主要是由于系统航迹在雷达覆盖区域边缘附近间歇性地失去 C 模式高度。在当前系统中,航迹与飞行计划不相关,也没有 C 模式数据,STCA 假设飞机从地面开始占据所有飞行高度,并认为这是干扰警报的根本原因(当航迹相关时,这不是问题,因为 STCA 使用许可飞行高度 (CFL))。其他观察结果包括从分离航迹生成或在飞机航迹滑行时生成的虚假 STCA 警报(即在缺少绘图数据的情况下推断系统航迹)。
使用 ads-b 改善空域监视 - Asecna.aero
地面(用于 ATC)ADS-B 旨在随着进近次数的增加而简化空中交通管制 (ATC),从而提高安全性并增加机场容量。空中(用于机组人员)ADS-B 提供信息以增强飞行员的交通意识,从而实现更优化的飞行高度,从而节省燃料。