XiaoMi-AI文件搜索系统
World File Search System馈送

修改 R-390A 以适应 SSB
按照最初的设计,R-390A HF 接收器在一定程度上可用于无需外部 SSB 转换器的 SSB 接收,但由于 AM 二极管检测器会产生相当大的失真,因此其性能非常差。信号与 BFO 注入电压的相对电平对于正确的 SSB 检测是不正确的。可以通过降低 RF 增益来使电平更加优化,但这样会失去 AGC 作用,并且弱信号会减弱到被忽略或听不到的程度。R-390A 设计用于将 IF 信号馈送到外部 SSB 转换器。但是,通过对内部 BFO 级进行简单且廉价的修改,将其改为产品检测器,R-390A 本身就可以充当出色的 SSB 接收器,SSB 无需外部转换器(但是,对于 ISB,需要外部转换器,形式为 2 个 CV-591 或 1 个 CV-157)修改非常简单、廉价,不需要任何合同采购行动,也不涉及任何专有设计。修改:一个人只需不到 2 小时的工作时间。转换所需的零件很少而且简单,成本不到十美元。
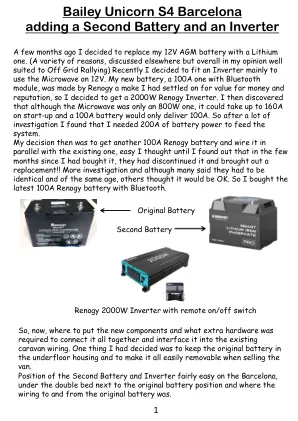
Bailey Unicorn S4 Barcelona添加了第二个电池和逆变器
几个月前,我决定用锂替换我的12V agm电池。(在其他地方讨论过的多种原因,但总的来说,我认为非常适合脱离电网集会),最近我决定适合一个逆变器,主要是在12V上使用微波炉。我的新电池是一个带有蓝牙模块的100A电池,是由Renogy A Make制作的,我已经确定了物有所值和声誉的价值,因此我决定获得2000W Renogy逆变器。i然后发现,尽管微波炉只有800W,但在启动时可能需要多达160A,而100A电池只能输送100A。因此,经过大量调查,我发现我需要200A电池电量来馈送系统。当时我的决定是再获得100A肾小管电池,并与现有的电池并行接线,我很容易想到,直到我发现自购买它以来的几个月中,他们停止了它并带出了替代品!进行了更多的调查,尽管许多人说他们必须相同且年龄相同,但其他人则认为可以。所以我用蓝牙购买了最新的100A肾小距电池。

优化BioTAC模拟现实触觉感知
摘要 - Tactile Sensing为增强当今机器人的相互作用功能提供了一个有希望的机会。Biotac是一种常用的触觉传感器,使机器人能够感知并响应物理触觉刺激。然而,传感器的非线性在模拟其行为时构成了挑战。在本文中,我们首先研究了使用温度,力和接触点位置来预测传感器输出的生物酸模拟。我们表明,使用BioTAC温度读数的培训不会在部署过程中产生准确的传感器输出预测。因此,我们测试了三个替代模型,即XGBoost回归剂,神经网络和变压器编码器。我们在没有温度读数的情况下训练这些模型,并对输入向量的窗口大小进行详细研究。我们证明,我们比基线网络实现了统计学上的显着改进。此外,我们的结果表明,在此任务中,XGBoost回归剂和变压器的表现优于传统的馈送神经网络。我们在https://github.com/wzaielamri/optimization Biotac仿真上在线提供所有代码和结果。索引术语 - Biotac,Xgboost,变压器,触觉感知

RL-VLM-F:从视觉语言基础模型反馈
奖励工程长期以来一直是加强学习(RL)研究的挑战,因为它通常需要大量的人类努力和试验和错误的局限性来设计有效的奖励功能。在本文中,我们提出了rl-vlm-f,这种方法通过利用视觉语言基础模型(VLMS)来利用馈送供给,从而自动为代理人学习新任务的奖励功能,并仅对任务目标的文本描述和代理人的视觉观察来生成新任务。我们方法的关键是要查询这些模型,以根据任务目标的文本描述对代理的图像观察对偏好,然后从偏好标签中学习重新函数,而不是直接提示这些模型输出原始奖励分数,这可能是嘈杂和一致的。我们证明,RL-VLM-F成功地产生了各个领域的有效奖励和政策,包括经典控制,以及操纵刚性,清晰和可变形物体的操纵,而无需人工监督,不需要人类的先验方法,这些方法均超过了在同一假设下使用奖励生成的大型奖励模型。

NMDA驱动的树突状调制可以在层次感觉处理途径中学习多任务表示
虽然大脑中的感觉表示取决于上下文,但尚不清楚如何在生物物理级别实现此类调制,以及如何在层次结构中进一步处理层可以为每个可能的contex-tum-tual状态提取有用的功能。在这里,我们证明了树突状n-甲基-D-天冬氨酸尖峰可以在生理约束中实施对馈送处理的上下文调节。这种神经元特定的调制措施利用了以稳定的馈电权重编码的先验知识,以实现跨环境的转移学习。在具有上下文独立的进发pefferward权重的生物物理逼真的神经元网络中,我们表明对树突分支的调节输入可以通过HEBBIAN,错误调查的学习规则解决线性不可分割的学习问题。我们还证明了表示表示的局部预测是源于不同输入的,还是来自相同输入的不同上下文调制,导致表示跨处理层的分层馈电权量的表示,以适应多种环境。

vfusion3d:从视频扩散模型中学习可扩展的3D生成模型
摘要。本文提出了一种利用预训练的视频扩散模型的新方法,用于构建可扩展的3D生成模型。开发基础3D生成模型的主要障碍是3D数据的可用性有限。与图像,文本或视频不同,3D数据不容易访问且难以获取。与大量其他类型的数据相比,这会导致规模差异显着。为了解决这个问题,我们建议使用视频扩散模型,该模型以大量文本,图像和视频培训,作为3D数据的知识源。通过通过微调解锁其多视图的能力,我们生成了一个大规模的合成多视图数据集,以训练一个馈送前进的3D生成模型。对近3M合成多视图数据进行训练的拟议模型Vfusion3D可以以秒的形式从单个图像中产生3D资产,并且与当前的SOTA Feed-Forward 3D生成模型相比,在90%以上的时间中,用户更喜欢我们的结果。

功能单元:材料科学的新观点...
摘要 - 定量反转算法允许在场景中的每个点构建电性能(例如介电常数和电导率)。但是,由于需要了解场景中的事件波场,因此这些技术在测量的反向散射相历史信号和数据集上都具有挑战性。通常,由于天线特征,路径丢失,波形因子等因素,这是未知的。在本文中,我们引入了一个标量校准因子来解释这些因素。为了解决校准因子,我们通过包括正向问题来增强反转过程,我们通过训练简单的馈送正式完全连接的神经网络来解决这些问题,以学习基本介电常数分布与雷达散射场之间的映射。然后,我们最大程度地减少了测得的和模拟字段之间的不匹配,以优化每个发射器的标量校准因子。我们证明了数据驱动的校准方法在菲涅尔研究所数据集中的有效性,其中我们显示了估计的场景介绍的准确性。因此,我们的论文为在现实成像场景中应用定量反转算法的应用奠定了基础。
优化用于建立Cupesat Inter Cubesat光学通信的采集模式
作为具有多达六个标准化单元的市售立方体,无法达到瞬时建立低差异光学卫星间链接所需的精度,因此使用搜索模式来扫描剩余的不确定性领域。此分析优化了两个激光通信终端的同时执行的搜索模式组合。基于蒙特卡洛模拟,研究了这些链接的扰动,并计算了相应的关键性能参数,例如平均获取时间和成功率。结果受到硬件规格的惩罚,包括由其设计给出的执行器和传感器带宽。残留态度错误组件意味着对采集过程的重要性,因此在本工作中呈现。图案对通过自动优化算法进行馈送,以调整和分析它们。在两种Cubeisl模型的这种特殊情况下,第一次检测到的采集命中的平均持续时间在3.2 s的模式周期内,表现最佳,螺旋玫瑰和Lissajous-Rose。假设由于有限的态度知识而导致的不确定性领域为±0.2 ver,达到了82.3%至99.9%的成功率。
成本最低的电力开发计划:2022年6月
i。修改和更新现有的政策,法律,监管,机构和财务框架,以支持电力行业的快速发展; ii。随着时间的推移,发电资源多样化,并随着时间的推移增加整体混合物中清洁能源的份额; iii。确保供应与预计的需求密切一致,并且更好地使投资计划和资助动员更加紧密地与发电路线图和总体计划,最低成本的电力开发计划以及电力区域行动计划; iv。增强电力区域合作和贸易,包括在传输网络开发中投资,以进一步提高供应安全; v。通过中期预算支出框架,修订和扩展现有的可再生能源馈送关税制度,开发新的信息管理系统以简化程序,并在计划,计划,采购和谈判电力交易中建立更大的能力,从而通过中期预算支出框架来确保计划项目的长期资金来简化IPP流程和快速跟踪项目交付。 “
遵守缓解措施的指导 3.20 避免考古资源
1) 如果您选择使用高分辨率调查数据进行评估,请根据《给承租人和经营人的通知》(NTL)第 2005-G07 号,使用足以提供 100% 侧扫声纳覆盖海底的线间距,在所有计划进行海底扰动活动的区域获取数据。例如,如果您计划的作业水深超过 400 米,并且您决定将井位或相关锚点移动最多 500 英尺(如 NTL 第 2009-G27 号所述),请确保调查覆盖的区域足够大,以解释这种变化。此外,可以使用之前收集的侧扫声纳数据,前提是它是使用 DGPS 定位收集的,并且具有足够的分辨率和质量,可供合格的海洋考古学家准确解释。如果使用多个数据集,则必须将所有数据合成为综合考古评估。 2) 如果您选择使用 ROV 调查进行评估,ROV 应配备声学定位和扇区扫描声纳。视频、声纳和导航都应录制到 DVD 中,以供查看。如果您打算在获得场地许可认证后立即开展已获批准的活动,则专业的海洋考古学家应在调查进行过程中观察调查情况,观察方式可以是亲自到场或通过远程互联网馈送,该馈送的质量和分辨率足以让考古学家进行分析。此外,考古学家必须能够与 ROV 驾驶员实时通信,以指导调查。如果发生视频或通信中断,则应在视频或通信恢复时从中断发生的位置继续调查。如果考古学家未能亲自到场从 ROV 控制室观察调查,他/她应在考古评估报告中通过审查记录的导航、声纳和视频文件证明调查已完成,项目区域得到充分覆盖,潜在目标未被忽略。3) 如果您提议拆除的结构位于之前未调查过的区块内,或者您的调查未涵盖拟议行动的所有影响,例如场地清理拖网、驳船锚、锚链、钢丝绳、电缆等,请使用常规调查仪器(即磁力计、侧扫声纳、海底剖面仪,数字记录并绑定到 DGPS 或其他相称的导航系统)在足够大的区域进行调查,以涵盖所有拟议的海底扰动活动。在水深超过 200 米(656 英尺)的地方,不需要使用磁力计。如果无法使用常规仪器,可以使用自主水下航行器 (AUV) 或深水拖曳系统获取这些数据。NTL 2005-GO7 提供了有关特定仪器的指导(http://www.boem.gov/Regulations/Notices-To-Lessees/2005/05-G07.aspx)。