XiaoMi-AI文件搜索系统
World File Search System高斯

使用高斯进程回归机器学习模型的Flyrock投掷预测
I.引言Flyrock是爆炸启动时远离采矿区的岩石质量。通常考虑的第一个参数是:负担,爆炸孔直径,深度,粉末因子间距,茎,爆炸性材料类型和sub-drill在Flyrock预测期间是可控参数。此外,爆炸工程师无法影响的岩石性能是无法控制的参数,例如压缩间距和岩石的拉伸强度。因此,爆炸工程师必须更改第一个参数,以最大程度地减少flyrock掷距离。设计了各种经验方程,以设想由爆破操作[1],[2]产生的fly架。经验模型是根据flyrock上的几个现场实验的有效参数开发的,即孔直径,爆炸性,茎,负担的密度,弹出材料,粉末因子和孔长度的初始发射速度。因此,这些经验方程的性能预测能力在许多情况下不是很有效[2],[3]。

从事与任务参数化的高斯流程一起学习的多参考框架技能
摘要 - 从演示中学习的核心挑战是生成适应能力并可以推广到看不见的情况的表示。这项工作建议在不使用特定于任务的启发式方法的情况下学习这种表示形式,而在全球框架中叠加本地技能,在多次参考框架技能学习的背景下。首先通过使用高斯流程(GPS)拟合相对技能来了解本地政策。然后,另一个GP决定了每个帧与每个时间步的相关性,它是从不同批次的演示中以自我监督的方式训练的。GP的不确定性定量能力被利用以稳定当地政策并以完全贝叶斯的方式训练框架相关性。我们通过在模拟中生成的多帧任务的数据集以及具有机器人操作的拾取和位置重新封闭任务的真实实验中生成的多帧任务。我们用两个指标评估了方法的性能:生成的轨迹与每个任务目标以及这些轨迹和测试专家轨迹之间的偏差有多近。根据这两个指标,所提出的方法始终优于最先进的基线,任务参数化的高斯混合模型(TPGMM)。

使用高斯潜在功能的修改后方程式开发避免障碍控制系统
摘要 - 行驶系统是自动驾驶汽车的必要系统,许多论文提出了轨迹跟踪和避免障碍物的技术。高斯潜在功能对于使用2D激光雷达避免障碍物的轨迹跟踪控制系统众所周知。缺点是它依赖于局部最小值,在某些情况下,车辆和目标正在朝着相同的方向移动,由于有吸引力的潜在领域的诱惑太高,因此车辆和目标正在朝着相同的方向移动。然后,已经引入了使用修改后的有吸引力功能避免障碍物的轨迹跟踪控制,该功能的常规吸引力功能被修改以改善导航系统。模拟是通过Carla模拟器进行的,并且使用修改功能的避免障碍物的运动在跟踪过程中的摇摆运动和横向运动过程中的安全性考虑,这是通过车辆的横向加速度来考虑的,其在模拟情况下的值比其他类型的有吸引力的功能少。同时,修改后的功能还保持了车辆和障碍物之间的安全距离差距,以免避免在障碍物范围内避免在非常接近的范围内,这可能会导致碰撞。关键字 - 三射跟踪控制系统,避免障碍物,高斯潜在功能,有吸引力的功能,Carla Simulator

InstantsPlat:无界的稀疏视觉无姿势无姿势的高斯裂口在40秒内
虽然新颖的视图合成(NVS)在3D计算机视觉中取得了进步,但通常需要从密集的视点对摄像机内在和外部设备进行初始估计。这种预处理通常是通过结构 - 运动(SFM)管道来进行的,这是一种可以缓慢且不可靠的操作,尤其是在稀疏视图方案中,匹配的功能不足,无法进行准确的重建。In this work, we integrate the strengths of point-based representations (e.g., 3D Gaus- sian Splatting, 3D-GS) with end-to-end dense stereo mod- els (DUSt3R) to tackle the complex yet unresolved is- sues in NVS under unconstrained settings, which encom- passes pose-free and sparse view challenges.我们的框架工作,InstantsPlat,用3D-GS统一了密集的立体声先验,以构建稀疏场景的3D高斯大型场景 -
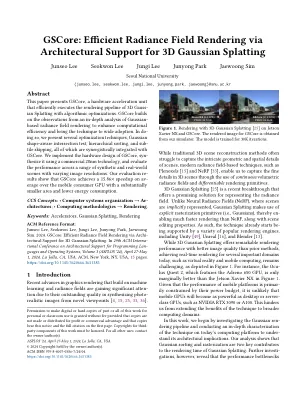
GSCORE:通过3D高斯脱落的架构支撑效率的有效辐射场渲染
摘要本文介绍了GSCORE,这是一个硬件加速器单元,该单元有效地执行了使用算法优化的3D Gauss-ian剥落的渲染管道。GSCORE基于对基于高斯的辐射场渲染的深入分析的观察,以提高计算效率并将技术带入广泛采用。在此过程中,我们提出了几种优化技术,高斯形状感知的交叉测试,分层排序和下图跳过,所有这些都与GSCORE协同集成。我们实施了GSCORE的硬件设计,使用商业28NM技术进行合成,并评估具有不同图像分辨率的一系列合成和现实世界场景的性能。我们的评估要求表明,GSCORE在移动消费者GPU上实现了15.86倍的速度,其面积较小,能源消耗较低。

量子和经典贡献费尔米金和玻色子高斯系统的熵产生
如前所述,熵产生(表征热力学过程的不可逆性的关键数量)与系统自由度及其热环境之间的相关程度的产生有关。这就提出了一个问题,即这种相关性是否具有分类或量子性质,即,是否可以通过对相关自由度的局部测量来访问它们。我们通过考虑费米子和玻色症高斯系统来解决这个问题。我们表明,对于费米子,熵产生主要是量子的,这是由于均衡超选择规则限制了一组物理允许的测量值,从而显着限制了经典可访问的相关性的数量。相比之下,在骨髓系统中,可以通过高斯测量访问更多的相关性。特别是在低温下量子的贡献可能很重要,但在高温限制中,熵产生对应于纯粹的经典位置 - 摩托明相关性。我们的结果表明,在熵产生的显微镜公式中,费米子和骨系统之间存在着关于存在量子到古典跨性别的重要区别。他们还表明,即使在弱耦合极限中,熵产生也可能主要是由量子相关性引起的,该耦合极限在状态种群的经典速率方程方面以及在低粒子密度极限中的描述,其中玻色子的传输性能和费米子的运输特性将其转化为经典颗粒的粒子。

通过高维高斯玻色子采样实现量子计算优势
光子学是一个很有前途的平台,它通过在明确定义的计算任务上超越最强大的经典超级计算机来展示量子计算优势 (QCA)。尽管前景光明,但现有的提案和演示仍面临挑战。在实验上,高斯玻色子采样 (GBS) 的当前实现缺乏可编程性或损失率过高。从理论上讲,GBS 的经典难度缺乏严格的证据。在这项工作中,我们在改进理论证据和实验前景方面取得了进展。我们提供了 GBS 难度的证据,可与 QCA 最强的理论提案相媲美。我们还提出了一种称为高维 GBS 的 QCA 架构,它是可编程的,可以使用少量光学元件以低损耗实现。我们表明,在适中的系统规模下,高维 GBS 实验优于模拟 GBS 的特定算法。因此,这项工作为使用可编程光子处理器展示 QCA 开辟了道路。
霍金辐射中的信息回归,高斯量子信息理论的视角
𝐶= 𝑆 diag 𝑑 1 , 𝑑 1 , 𝑑 2 , 𝑑 2 , ⋯, 𝑑 𝑁 , 𝑑 𝑁 𝑆 𝑇 实对称 C 可以通过辛变换 S 转化为对角形式。高斯纯态有 𝑑 1 = 𝑑 2 = ⋯= 𝑑 𝑁 = 1 。
用隐藏的高斯图形光谱模型识别振荡性脑网络
识别基于间接观察到的过程的功能网络构成了神经科学或其他领域的反问题。对此类反问题的解决方案估算为第一步,该活动从脑电图或MEG数据中从功能网络中出现。这些脑电图或MEG估计是对功能性脑网络活动的直接反映,其时间分辨率是其他体内神经图像无法提供的。第二步估计了此类活动pseudodata的功能连通性,揭示了与所有认知和行为密切相关的振荡性脑网络。对此类MEG或EEG逆问题的模拟还揭示了由任何最新的反溶液确定的功能连接性的估计误差。我们揭示了估计误差的重要原因,该原因源自将任一个逆解决方案步骤的功能网络模型的错误指定。我们介绍了指定这种振荡性脑网络模型的隐藏高斯图形光谱(HIGGS)模型的贝叶斯识别。在人EEGα节律模拟中,以ROC性能为单位测得的估计错误在我们的HIGG逆溶液中不会超过2%,而最先进的方法中的估计误差则达到20%。猕猴同时发生的EEG/ECOG记录为我们的结果提供了实验性确认,根据Riemannian距离,其一致性比最新的方法高的1/3倍。

相对于连续尺度空间的近似属性,用于高斯导数算子的混合离散
本文基于与归一化采样的高斯核或综合高斯内核的卷积,对高斯衍生物的两种混合离散方法的性质进行了分析。研究这些离散方法的动机是,在相同规模水平上需要多个阶的多个空间衍生物时,与基于更直接的衍生近似值相比,它们基于基于更直接的衍生近似值而具有更高的效率相比,它们基于具有较高的衍生性速率,以示例性衍生性衍生性不能衍生性不能进行。我们根据定量绩效指标来表征这些混合离散方法的特性,同意它们所暗示的空间平滑量,以及它们从量表 - 流动特征探测器的相对一致性以及从自动量表选择中获得的量表的相对一致性,从尺度上的量表与尺度相关的量度相差很大,该尺度的范围与尺度的相差相差,该尺度的尺度是有效的。理论以及不同类型的离散方法之间。在设计和解释以非常精细的水平运行的规模空间算法的实验结果时,提出的结果旨在作为指导。