XiaoMi-AI文件搜索系统
World File Search System高程
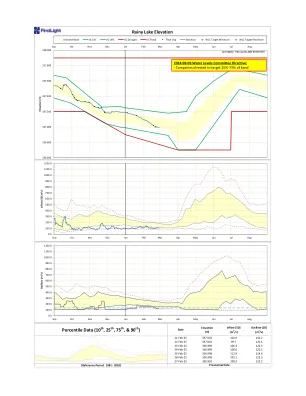
高程程序30012025 div>
博士凯瑟琳·齐萨基(Catherine Zisaki)博士Aikaterini Zisaki质量和监管系统和PKNM SolutionsSàrl|质量保证管理系统和监管事务总监,PKNM解决方案Sàrl

激光雷达高程数据精度评估...
1 澳大利亚莫纳什大学地理与环境科学学院 GIS 中心,Clayton VIC 3800,澳大利亚 2 澳大利亚可持续集水区中心和南昆士兰大学工程与测量学院 Toowoomba QLD 4350,澳大利亚 电子邮件:xiaoye.liu@usq.edu.au 摘要 机载 LiDAR 已成为广泛应用中数字高程数据采集的首选技术。相对于指定垂直基准的垂直精度是指定 LiDAR 高程数据质量的主要标准。LiDAR 高程数据的定量评估通常通过将高精度检查点与从 LiDAR 地面数据估计的高程进行比较来进行。然而,通过现场测量收集足够数量的检查点是一项耗时的任务。本研究使用测量标记评估农村地区不同土地覆盖的 LiDAR 数据的垂直精度,并探索从与检查点位置相对应的 LiDAR 数据中获取高程的不同方法的性能。使用频率直方图和分位数-分位数图对 LiDAR 数据和检查点之间的垂直差异进行了正态性检验,因此可以使用适当的测量方法(公式 1.96 × RMSE 或 95 百分位数)来评估不同土地覆盖的 LiDAR 数据的垂直精度。结果证明了使用测量标记作为检查点来评估 LiDAR 数据垂直精度的适用性。关键词:LiDAR、机载激光扫描、数字高程模型、测量标记、精度评估 引言 机载光探测和测距 (LiDAR),也称为机载激光扫描 (ALS),是最有效的地形数据收集手段之一。使用 LiDAR 数据生成数字高程模型 (DEM) 正在成为空间科学界的标准做法 [10]。LiDAR 输出的一个吸引人的特点是点的三维坐标的高密度和高精度,其特点是垂直精度为 10-50 厘米 RMSE(均方根误差)在 68% 置信水平下(或 19.6-98 厘米在 95% 置信水平下),水平点间距为 1-3 米 [13]。只有在最理想的情况下才能实现 10-15 厘米 RMSE(置信度为 68%)的更高垂直精度 [ 10 ]。LiDAR 数据质量评估方法也因应用和 LiDAR 数据的交付格式而异。项目中 LiDAR 高程数据的实际精度取决于飞行高度、激光束发散度、扫描带内反射点的位置、LiDAR 系统误差(包括全球定位系统 (GPS) 和惯性测量单元 (IMU) 的误差)、与 GPS 地面基站的距离以及 LiDAR 数据分类(过滤)可靠性 [10]、[27]。对于使用分类的 LiDAR 点云生成的 DEM,相对于指定垂直基准的垂直精度是指定 LiDAR 高程数据质量的主要标准 [19]。LiDAR 高程数据的定量评估通常通过将高精度检查点与从 LiDAR 估计的高程进行比较来进行
ICSM 数字高程数据指南
几乎所有用于生成高程数据的数据采集技术都是基于从上方遥感地形和海床。因此,首先建模的表面是“反射”表面,包括建筑物和植被以及裸地。数字表面模型 (DSM) 本身就是一个非常有用的高程数据集。在使用新获取的数据提供国家高程数据集的情况下,实际上还必须生成国家 DSM,然后通过对后者进行后处理来创建前者。准确全面地去除“地上”特征或“人工制品”仍然是 DTM/DEM 生成中面临的重大挑战之一,尤其是在城市和植被茂密的地区。

路易斯安那州新奥尔良的数字高程模型
1.简介 2010 年 4 月,美国国家海洋和大气管理局 (NOAA) 下属的国家地球物理数据中心 (NGDC) 开发了路易斯安那州新奥尔良的三个水深地形数字高程模型 (DEM)(图1)。这些 DEM 是根据 2009 年美国复苏与再投资法案 (ARRA) 1 为 NOAA 海岸调查发展实验室 (CSDL) 开发的,旨在评估 Vertical.Datum 的实用性。转换工具 ( VDatum ) 由 NOAA 海岸调查办公室 (OCS)、国家大地测量局 (NGS) 和业务海洋产品和服务中心 (CO-OPS) 联合开发 ( http://vdatum.noaa.gov/ )。参考 1988 年北美垂直基准 (NAVD 88) 的 1/3 弧秒 2 DEM 经过精心开发和评估。从 VDatum 派生的 NAVD 88 到平均高水位 (MHW) 1/3 弧秒转换网格。然后创建项目区域以模拟新奥尔良地区的 NAVD 88 和 MHW 之间的关系。NGDC 将 NAVD 88 DEM 和转换网格结合起来开发了 1/3 弧秒 MHW DEM。使用相同的过程生成平均低低水位 (MLLW) 1/3 弧秒转换网格。NAVD 88 DEM 是根据该地区的各种数字数据集生成的(网格边界和来源如图 1、5 和 10 所示),这些 DEM 将用于风暴潮淹没和海平面上升建模。本报告总结了开发三个新奥尔良 DEM 所使用的数据源和方法。

基于 ICESat 的格陵兰岛数字高程模型 ...
摘要。格陵兰数字高程模型 (DEM) 对于实地考察、冰速计算和质量变化估计必不可少。以前的 DEM 为整个格陵兰岛提供了合理的估计,但应用源数据的时间跨度可能会导致质量变化估计偏差。为了提供具有特定时间戳的 DEM,我们应用了大约 5 。从 2018 年 11 月到 2019 年 11 月的 8 × 10 8 ICESat-2 观测来生成新的 DEM,包括格陵兰岛外围的冰盖和冰川。分别在 500 m、1 km、2 km 和 5 km 网格单元进行时空模型拟合过程,并以 500 m 的模态分辨率发布最终 DEM。总共有 98% 的网格由模型拟合获得,其余的 DEM 间隙通过普通克里金插值法估算。与机载地形测绘仪 (ATM) 激光雷达系统获取的 IceBridge 任务数据相比,ICESat-2 DEM 估计最大中值差异为 − 0 。48 米。通过模型拟合和插值获得的网格性能相似,均与 IceBridge 数据高度一致。在低纬度和高坡度或粗糙度地区,DEM 不确定性会增加。此外,与其他高度计得出的 DEM 相比,ICESat-2 DEM 显示出显着的精度改进,并且其精度与立体摄影测量和干涉测量得出的精度相当。格陵兰 DEM 及其不确定性可在 https://doi.org/10.11888/Geogra.tpdc.271336 (Fan 等人,2021 年) 上找到。总体而言,ICESat-2 DEM 在各种地形条件下都表现出了出色的精度稳定性,可以提供具有特定时间戳的高精度 DEM,这将有助于研究格陵兰岛海拔和质量平衡变化。

历史景观的数字高程模型生成...
关键词 机载 LiDAR;DEM;过滤;地质考古学;微地形;景观可视化;多尺度概念 摘要 本文讨论了基于高密度机载 LiDAR(光检测和测距)数据生成高精度 DEM(数字高程模型),用于跨学科景观考古研究,研究比利时根特北部 Sandy Flanders 地区的定居历史和环境。目标是创建一个没有人工特征和地形伪影的详细地形表面,以 DEM 的形式,仅通过实现真实地面点来可视化自然和当前地形。这些特征和伪影的半自动去除基于地形矢量数据、视觉解释和坡度分析。最终构建了两个 DEM:(1)TIN(不规则三角网)模型,其固有的大文件格式限制了其在大规模上的可用性;(2)网格模型,可用于小规模、中规模和大规模应用。这两个数据集都用作使用历史资料中的辅助数据进行解释的图像。其实用性在田野模式和微田野地形的案例中得到了说明。从这个 DEM 开始,这项景观历史研究的方法主要是倒退性的,即从当代景观中仍然存在并不断移动的景观结构和元素开始
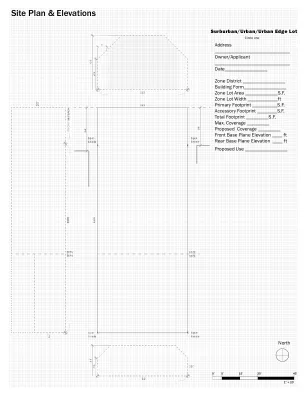
住宅现场计划和高程示例
区域批次区域6,250 S.F.50英尺宽的区域批次主要结构足迹= 1,392 S.F.独立的车库足迹= 216 S.F.*每DZC总建筑物足迹= 1,608 S.F. 50%降低。总建筑物覆盖范围= 26%1,608 / 6,250 = .259 = .259或26%最大允许的建筑物覆盖= 37.5%2停车位提供了前基平均平均水平= 93.2'(93.5+91.5) / 2 = 93.2 = 93.2 = 93.2'后基本平面平均平均水平= 91.9+91.9+91..9+91.0.0.5 = 91.5 = 91.45'<<<<<91.5'<<<<<<91.45''

生成高分辨率数字高程模型...
地理信息系统 (GIS) 生成的数字高程模型 (DEM) 已被证明是水文研究中的有用工具,除其他外,它有助于划定集水区、确定排水模式和流径以及确定径流。它们在地形相对平坦的地区特别有价值,因为这些地区通常很难完成这些任务。然而,由于湿地的高程差异通常低于或刚好在标准地形图的等高线间隔范围内,标准地形图的等高线间隔通常为 20 米,某些地区为 5 米,因此后者无法提供足够的细节。这意味着湿地研究通常很难获得足够详细的地形信息。相对于许多研究预算而言,针对特定地点的高分辨率地形调查过于昂贵,无法成为可行的替代方案。本文以喀斯特泥炭地周围约 12 平方公里的研究区域为基础,介绍了一种以 1 米为间隔、低成本从 Google Earth TM 卫星图像中检索所需高分辨率高程数据的方法。本文介绍了使用 GIS ArcDesktop™ 捕获和处理数据以生成高分辨率等高线图和 DEM 的程序。为了保证质量,将生成的地图与总局测绘局 (CDSM) 发布的 5 米和 20 米等高线间隔标准地形图 (1:50000) 进行视觉比较。c 之后

D2.8.II.1 高程数据规范 – 技术指南
前言 如何阅读本文件?本文件使用自然和概念模式语言描述了由高程专题工作组 (TWG) 开发的“INSPIRE 高程数据规范 - 技术指南”版本 3.0。数据规范基于用于所有数据规范的通用模板 1,该模板已使用附件 I、II 和 III 数据规范的开发经验进行了协调。本文件为实施 INSPIRE 指令空间数据集和服务实施规则中规定的条款提供了指导方针。它还包括其他要求和建议,虽然这些要求和建议未包含在实施规则中,但与保证或提高数据互操作性有关。两个执行摘要简要概述了 INSPIRE 数据规范过程的总体情况,特别是高程数据规范的内容。我们强烈建议管理人员、决策者以及所有不熟悉 INSPIRE 流程和/或信息建模的人员首先阅读这些执行摘要。UML 图(第 5 章)提供了一种快速查看规范的主要元素及其关系的方法。空间对象类型、属性和关系的定义包含在要素目录中(也在第 5 章中)。具有主题专业知识但不熟悉 UML 的人可以完全理解专注于要素目录的数据模型的内容。用户可能还会发现要素目录特别有用,可以检查它是否包含他们运行的应用程序所需的数据。预计技术细节将成为那些负责在高程领域实施 INSPIRE 的组织的主要兴趣所在,同时也是其他利益相关者和空间数据基础设施用户的主要兴趣所在。技术条款和底层概念通常通过示例来说明。较小的示例在规范文本内,而较长的解释性示例和选定用例的描述则附在附件中。为了将 INSPIRE 空间数据主题与空间对象类型区分开来,INSPIRE 空间数据主题以斜体表示。