机构名称:
¥ 1.0
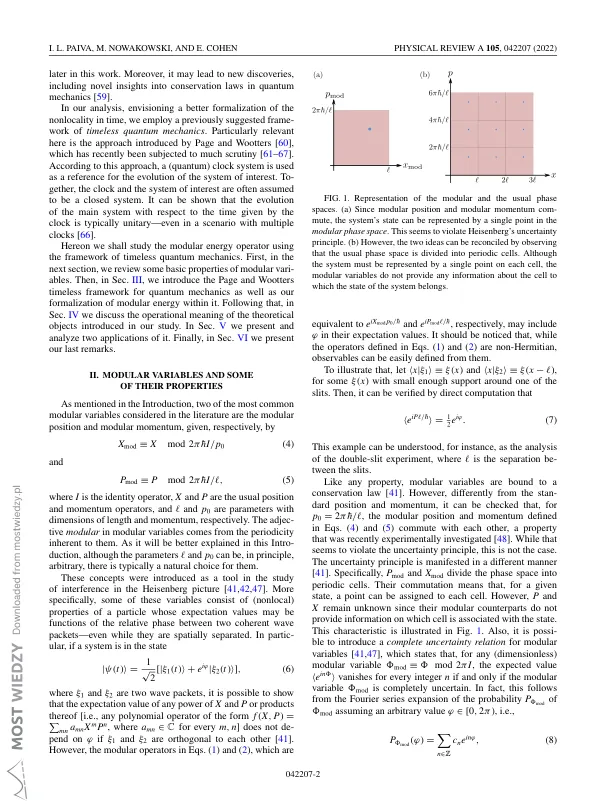
非局域性是一个引人注目的概念,自量子理论诞生之初 [1,2] 至今,它一直吸引着学术界越来越多的兴趣。无论是通过贝尔非局域性 [3,4]、量子操控 [5,6]、一般的量子纠缠 [7],还是更广泛的量子不和谐 [8–11],非局域性一直是量子基础研究的核心。这是有原因的:由于多个实验证实了贝尔不等式的量子违反 [12–19],人们相信量子力学与经典力学有着根本的不同。这些研究带来了理论和技术突破 [20–28]。此外,甚至可以讨论时间中的纠缠 [29–33]。上述类型的非局域性与系统的制备(或制备和测量)有关。因此,它可以称为运动非局域性。使用模变量的概念引入的另一种非局域性[34]与量子系统遵循的运动方程有关,因此称为动态非局域性。尽管这些变量非常有前景,正如在连续系统量子信息的首次应用中已经证明的那样[35-38],但它们尚未得到社区相当一部分人的充分关注[39]。文献中考虑的最常见的模变量类型是模位置和模动量[35-48]。事实上,设ℓ和p0分别为长度和动量维数的参数,模算子
通过模算子实现量子时间中的动态非局域性
主要关键词




相关文件推荐