机构名称:
¥ 1.0
摘要:人类动议的预测是对人类自主机器人安全导航的关键。在混乱的环境中,由于其与环境和其他脚步的相互作用,可能会有几种运动假设。以前用于估计多个运动假设的工作需要大量样本,这限制了其在实时运动计划中的适用性。在本文中,我们提出了一种基于深层生成神经网络的相互作用和多模式轨迹预测的变分学习方法。我们的方法可以实现更快的收敛性,并且与最新方法相比,需要更少的样本。对真实和模拟数据的实验结果表明,我们的模型可以有效地学习推断出不同的轨迹。我们将我们的方法与三种基线方法进行了比较,目前的性能结果表明,我们的生成模型可以通过产生各种轨迹来实现轨迹预测的更高准确性。
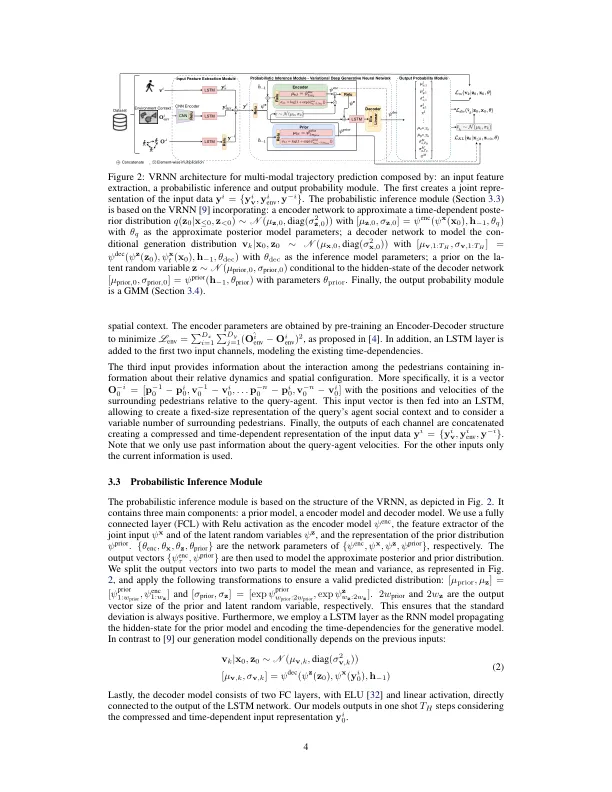
社交 - vrnn:互动行人的单次多模式轨迹预测
主要关键词




相关文件推荐