机构名称:
¥ 1.0
I.我的机器人变得越来越无处不在,预计更多的机器人将在共享环境中共同操作和协调以执行复杂且协作的任务。对于许多任务,至关重要的是,要准确,精确地估算机器人的姿势,也称为机器人定位。尽管文献中已经提出了许多本地化系统,但大多数作品都集中在单机器人设置上。然而,仅依靠一个机器人的本体感受和外部感受传感器来定位,而且通常限制,尤其是在多机器人方案中,相对定位对于确保机器人安全有效地相互作用至关重要。这激发了多机器人协作的本地化,其中机器人利用彼此的观察结果来提高自己的本地化准确性,因此,多机器人系统的整体准确性。但是,共定位的准确性很大程度上依赖于传感器的外部校准质量(例如视觉摄像头,测距仪)及其在其他机器人上可以检测到的标记(例如Apriltags,反射标记)。尽管大多数作品经常将这种外在的核心视为理所当然,但实际上,默认的事业校准只能在一定程度上精确。这在多机器人设置中尤为重要,在多机器人设置中,手动校准变得不切实际且高度准确,即按手机校准会导致高运营成本。在本文中,我们设想了一个系统(见图1)多个机器人在移动和感官
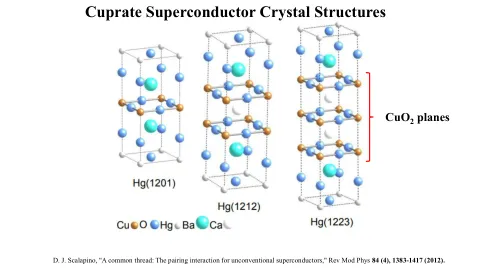
解码122型铁的超导体
主要关键词





相关文件推荐