机构名称:
¥ 1.0
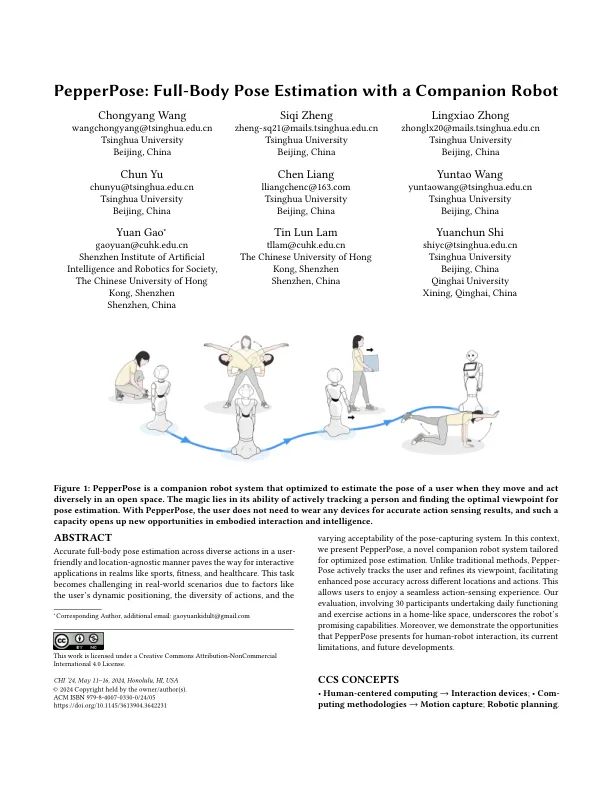
许多著名的研究工作[40,53,70]强调了准确的全身姿势估计的重要性,尤其是在涉及多个身体部位的行动成为信息交换的基本渠道的情况下。这尤其是在运动员训练[50],运动教练[42]和运动康复[11,61]等领域的应用。在这些情况下,从全身姿势中提取详细的运动学特征的能力对于这些交互式系统的有效操作至关重要。但是,在开放和现实世界中实施姿势捕获系统构成了巨大的挑战。这在很大程度上是由于目标运动在各个空间位置及其行动的多样性的不可预测性。此外,要考虑到幼稚用户的可接受性至关重要,尤其是当他们需要佩戴设备或留在特定区域以享受服务时。为了在用户舒适度和姿势估计精度之间达到平衡,我们寻求一种多功能,灵活和交互式的副驾驶,当他们在空旷的区域移动和行动时,可以积极了解用户的骨骼姿势。鉴于机器人技术的最新进展,采用视觉机器人为此目的成为有前途的解决方案。尽管如此,这在用视觉系统驱动机器人时构成了独特的挑战和问题。在这项探索性工作中,我们针对一个中心问题:如何使视觉机器人适应其位置和观点,以跨不同空间位置和动作类型进行最佳姿势估计?工作这对于基于视觉的系统至关重要,因为固定视角和用户的不同方向引起的遮挡可以显着降低准确性。解决这些问题时,本文介绍了Pepperpose,这是与类人生物机器人集成的以姿势估计为中心的机器人系统[6]。我们训练了机器人在移动目标时积极跟踪他们,并调整观点以改善姿势估计结果。因此,Pepperpose可以充当基本的动作感应平台,该平台消除了用户对戴其他设备或留在受限区域内的需求。我们在涉及30名参与者的现实世界中评估了该系统的性能。,我们通过利用从参与者的全身运动捕获诉讼中获得的同步高保真姿势来量化其姿势估计的精度,从而整合了惯性测量单元(IMUS),其轨道损失率以及向各种参与者行动中的最佳观察位置移动到最佳观察位置的速度。虽然这种机器人的当前成本可能无法承受,但我们强调了机器人姿势估计解决方案的潜力,该解决方案可能会提供更丰富的交互机会,对用户体验的影响很小。
Pepperpose:带有伴侣机器人的全身姿势估计
主要关键词



相关文件推荐