机构名称:
¥ 1.0
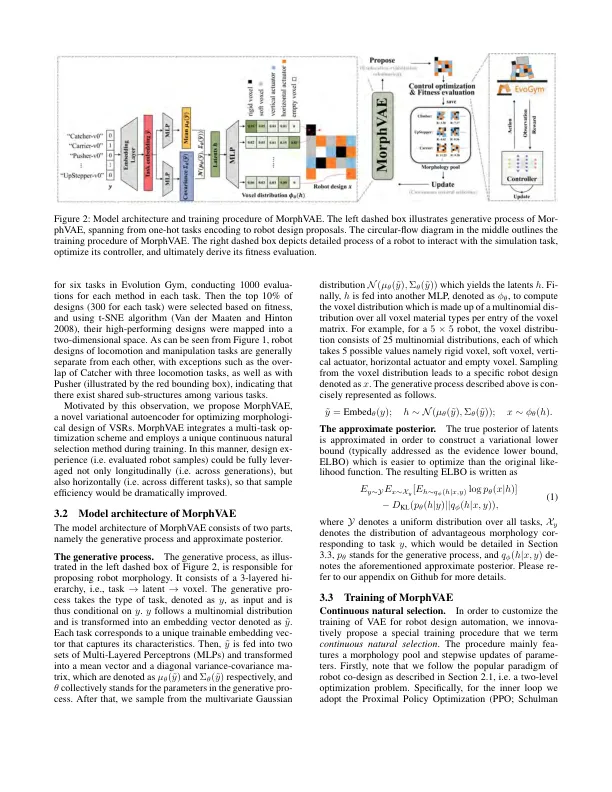
软机器人设计是一个复杂的领域,由于其复杂且广阔的搜索空间,面临着独特的挑战。在过去的文献中,进化计算算法(包括新型概率生成模型(PGM))在该领域显示了潜力。但是,这些方法是效率低下的样本,主要关注运动任务中的刚性机器人,这限制了它们在机器人设计自动化中的性能和应用。在这项工作中,我们提出了Morphvae,这是一种创新的PGM,它结合了多任务培训方案和精心制作的采样技术,称为“连续自然选择”,旨在增强样品效率。这种方法使我们能够从各种任务和时间进化阶段进行评估的样本中获得见解,同时保持光学效率和生物多样性之间的微妙平衡。通过各种运动和操纵任务的广泛表达,我们证实了形态在产生高性能和多样化设计方面的效率,超过了竞争性基线的性能。
morphvae:发展体素的形态设计 -
主要关键词



相关文件推荐