机构名称:
¥ 1.0
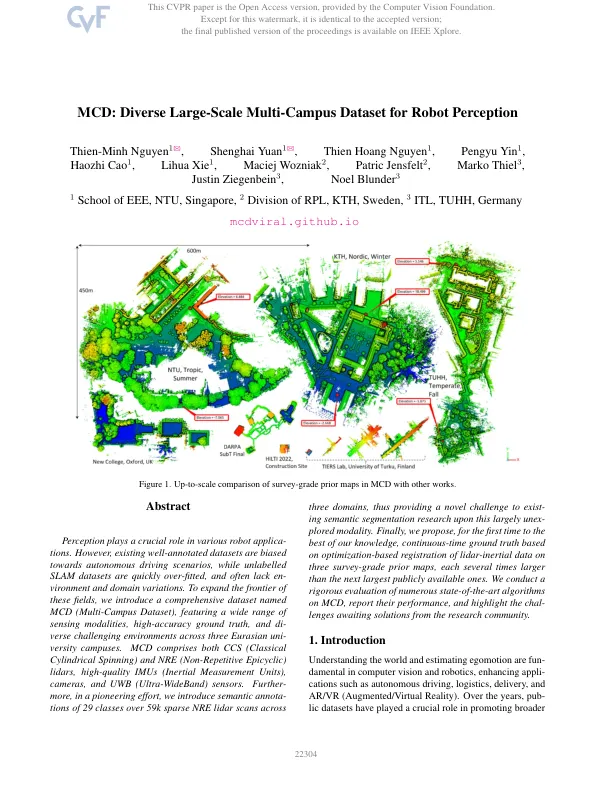
感知在各种机器人应用中起着至关重要的作用。但是,现有的良好的数据集偏向自动驾驶场景,而未标记的SLAM数据集则很快过于拟合,并且通常缺乏环境和域变化。为了扩大这些领域的边界,我们介绍了一个名为MCD(Multi-campus数据集)的全面数据集,其中包含各种感应方式,高准确的地面真相以及在三个欧亚大学的欧亚大学校园内的挑战性环境。MCD包括CCS(经典的圆柱旋转)和NRE(非重复性环球)LIDAR,高质量的IMU(惯性测量单元),相机和UWB(URWB(Ultra-Wideband))传感器。更重要的是,在开创性的努力中,我们引入了29堂课的语义注释,超过59k稀疏的nre lidar扫描
MCD:机器人感知的多种大型多校区数据集
主要关键词



相关文件推荐