机构名称:
¥ 1.0
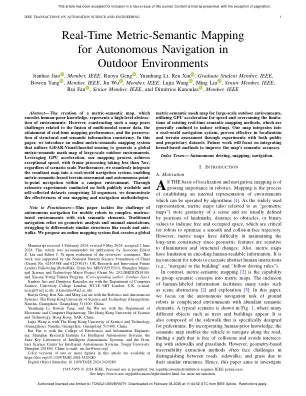
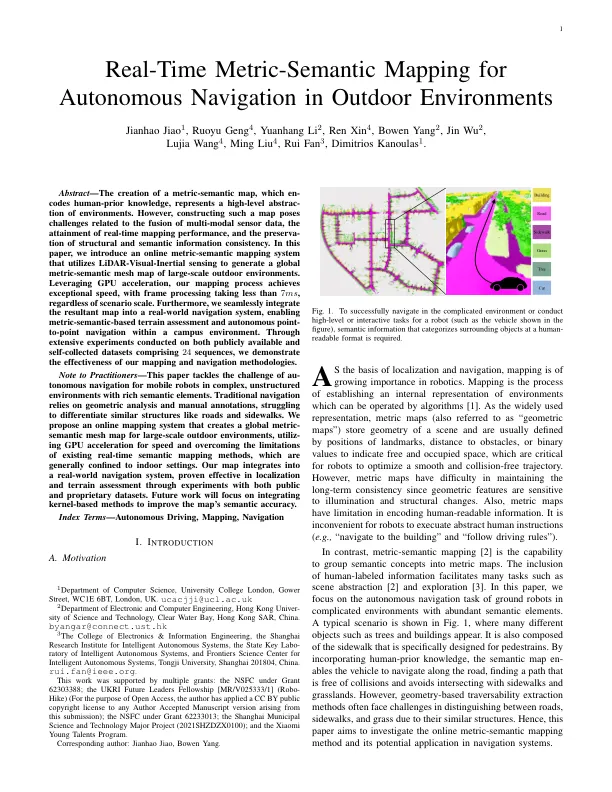
摘要 - 纳入人为优先知识的度量语义图的创建代表了环境的高级突出。然而,构建此类地图构成了与多模式传感器数据融合,实时映射性能的融合以及结构和语义信息一致性的保留相关的挑战。在本文中,我们引入了一个在线度量 - 语义映射系统,该系统利用LIDAR-Visual-Visual-Visual惯性传感生成了大型室外环境的全局度量标准网格地图。利用GPU加速度,我们的映射过程达到了出色的速度,无论场景尺度如何此外,我们将所得地图无缝地集成到现实世界中的导航系统中,从而实现了基于公制的语义地形评估和在校园环境中的自主点 - 要点导航。通过对包含24个序列的公共可用数据集进行的广泛实验,我们证明了映射和导航方法的有效性。对从业者的注释 - 本文在复杂的,非结构化的环境中应对具有丰富语义元素的复杂,非结构化环境中的移动机器人的竞争挑战。传统导航依赖于几何分析和手动注释,努力区分相似的结构,例如道路和人行道。我们的地图集成到现实世界中的导航系统中,通过与公共和专有数据集进行实验,可在本地化和地形评估中有效。索引条款 - 自主驾驶,映射,导航我们提出了一个在线映射系统,该系统为大型室外环境创建全局标准网格地图,利用GPU加速速度,并克服了现有的实时语义映射方法的限制,这些方法通常可以配置为室内设置。未来的工作将集中于整合基于内核的方法,以提高地图的语义准确性。
户外环境中自动导航的实时衡量标准映射
主要关键词


相关文件推荐