运送战备部队
可下载资源数量
{[down_number]}
10次
已经购买
下载数量:1
单价
0
1.0
Coupon
100%
0%
Total
0
1.0
点击下载
点击购买并下载
点击购买,资源将自动在新窗口打开.
×
Loading...
人工代下载
小计
杂项
总计
0
个米粒
查看全部
国际科研文献搜索
国际快讯
主要栏目
国防要闻
全球经济
科技动态
航空航天
人工智能
网络安全
国防标准
国际标准
国际政策
国际事务
北约/欧盟
军事学院
教育培训
国际智库
军工集团
国防要闻相关机构
美国国防部新闻
俄罗斯国防部-创新公报
美国国防部探索
美国陆军官网
美国陆军网络司令部
美国海军新闻发布会
美国海军陆战队新闻
美国空军太空技术
美国空军创新
人工智能相关机构
AI新闻
亚马逊云科技 _机器学习
大数据分析新闻
NVIDIA 博客 _机器人技术
Apple机器学习研究
北约/欧盟相关机构
欧洲联盟理事会新闻
欧洲联盟理事会欧洲理事会会议
NATO Watch
国际智库相关机构
美国进取研究所信息
兰德国防安全研究中心首页
科学与国际安全研究所信息
英国皇家战略研究所新闻
美国数学政策研究中心信息
澳大利亚研究所新闻
科技动态相关机构
LiveScience
日本NLI研究所信息
美国国家标准与技术研究院__纳米技术
航空航天相关机构
航空界
国防镜报
BAA Training博客
航空资源新闻
全球经济相关机构
纽约时报 _经济
经济时报
经济观察
CityAM经济学
教育培训相关机构
斯坦福社会创新评论(SSIR)
哈佛大学学报
普林斯顿大学
约翰霍普金斯大学
宾夕法尼亚州立大学
BIG SALE
Up to
70%
获取独家产品信息,尽享促销优惠!立即订阅,不容错过
点击订阅喽!
* 限···时··优惠
查看
所有分类和相关机构
点击查看所有机构
查看所有分类和相关机构
文件翻译
超大PDF文件翻译
用户中心
注册
登录
修改密码
重置密码
登出
账户余额
订阅和下载
我的国际快讯订阅
人工代下载列表
进行中订单
已完成订单
机构名称:
运送战备部队
¥ 1.0
热度
同步、集成和交付物资准备
添加pdf代下载
VIP点击下载文件
运送战备部队
Facebook
Twitter
Instagram
Mail
主要关键词
同步
交付
物资
物资准备
集成
准备
相关文件推荐
2023 年
进攻后勤:集结和运送
¥1.0
2024 年
附件 T.4 入伍奖金协议(快速运送奖金)
¥1.0
2024 年
2024 年 2 月 12 日更新运送您的家居用品……
¥1.0
2024 年
2024 年 2 月 14 日更新 运送摩托车...
¥1.0
2021 年
配备人工智能的智能胶囊可通过无人机自动运送医疗物资
¥1.0
2022 年
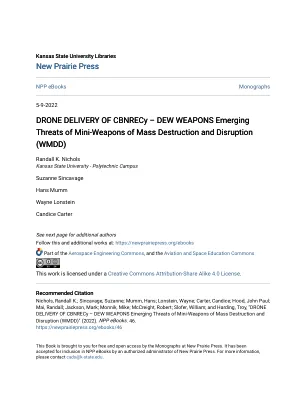
无人机运送 CBNRECy â•fi DEW 武器 新兴的微型大规模杀伤和破坏性武器 (WMDD) 威胁
¥77.0
2023 年
OIX GATEWAY HONOLULU HI 成功处理报告:现役部队入伍奖金 (EB) 已发放 MSG_ID:600052784574 RTTUZYUW RHOIAAA0001 0471832-UUUU--RHSSSUU。 ZNR UUUUU R 161635Z 2 月 23 日 MID600052784574U FM COMNAVCRUITCOM MILLINGTON TN TO FUNCSERVCTR GREAT LAKES IL FUNCSERVCTR NORFOLK VA PERSUPP DET KITSAP WA PERSUPP DET NEW LONDON CT PERSUPP DET WASHINGTON DC PERSUPP DET YOKOSUKA JA PERSUPP DET WPNSTA CHARLESTON SC PERSUPP DET PENSACOLA FL DFAS CLEVELAND OH INFO CNO WASHINGTON DC NETC PENSACOLA FL COMNAVCRUITCOM MILLINGTON TN COMNAVRESFORCOM NORFOLK VA BT UNCLAS MSGID/GENADMIN/COMNAVCRUITCOM MILLINGTON TN/N2/MAR// SUBJ/ACTIVE COMPONENT入伍奖金(EB)和预备役部队运送奖金// REF/A/MSG/COMNAVCRUITCOM/ 291438Z 12 月 22 日// REF/B/DOC/COMNAVCRUITCOM/21JUL22// REF/C/DOC/OPNAV/3JUN19// REF/D/DOC/NDAA/2023// REF/E/DOC/DODI/5NOV2020// REF/F/MSG/ALNAVRESFOR 0032/042037Z 10 月 22 日// REF/G/MEMO/CNP/15JUN21// REF/H/OPNOTE148/NRCN3/06SEP22// REF/I/MEMO/CNR/6FEB23// NARR/REF A 是现役部队入伍奖金 (EB) 和预备役部队运送奖金。参考 B 是 COMNAVCRUITCOMINST 1130.8M,海军招募手册-入伍。参考 C 是 OPNAVINST 1160.9A,EB 计划说明。参考 D 是 2023 年国防授权法案 (NDAA),授权入伍奖金至 2023 年 12 月 31 日。参考 E 是国防部说明 1304.31,入伍奖金计划。参考 F 是 FY23 选定预备役入伍招募和保留激励措施,EB 计划说明。参考 G 是 D
¥1.0
2023 年
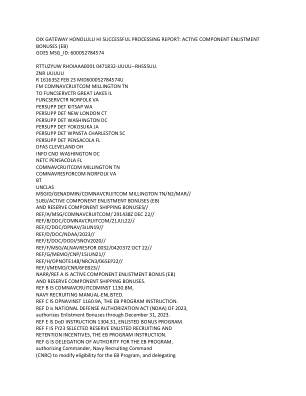
OIX GATEWAY HONOLULU HI 成功处理报告:现役部队入伍奖金 (EB) GOES MSG_ID:600052924563 RTTUZYUW RHOIAAA0001 0941453-UUUU--RHSSSUU。 ZNR UUUUU R 041435Z 4 月 23 日 MID600052924563U FM COMNAVCRUITCOM MILLINGTON TN TO FUNCSERVCTR GREAT LAKES IL FUNCSERVCTR NORFOLK VA PERSUPP DET KITSAP WA PERSUPP DET NEW LONDON CT PERSUPP DET 华盛顿特区 PERSUPP DET YOKOSUKA JA PERSUPP DET WPNSTA 查尔斯顿 SC PERSUPP DET 彭萨科拉 FL DFAS 克利夫兰 OH INFO CNO 华盛顿特区 NETC 彭萨科拉 FL COMNAVCRUITCOM MILLINGTON TN COMNAVRESFORCOM NORFOLK VA BT UNCLAS MSGID/GENADMIN/COMNAVCRUITCOM MILLINGTON TN/N2/MAR// SUBJ/ACTIVE COMPONENT入伍奖金(EB)和预备役部队运送奖金// REF/A/MSG/COMNAVCRUITCOM/161635Z 2 月 23 日// REF/B/DOC/COMNAVCRUITCOM/21JUL22// REF/C/DOC/OPNAV/3JUN19// REF/D/DOC/NDAA/2023// REF/E/DOC/DODI/5NOV2020// REF/F/MSG/ALNAVRESFOR 009/241750Z 3 月 23 日// REF/G/MEMO/CNP/15JUN21// REF/H/OPNOTE148/NRCN3/06SEP22// REF/I/MEMO/CNR/6FEB23// NARR/REF A 是现役部队入伍奖金 (EB) 和预备役部队运送奖金。参考 B 是 COMNAVCRUITCOMINST 1130.8M,海军招募手册-入伍。参考 C 是 OPNAVINST 1160.9A,EB 计划说明。参考 D 是 2023 年国防授权法案 (NDAA),授权入伍奖金有效期至 2023 年 12 月 31 日。参考 E 是国防部说明 1304.31,入伍奖金计划。参考 F 是 FY23 选定预备役入伍招募和保留激励措施的更新,EB 计划说明。 REF G 是 EB 计划的授权委托,授权海军招募司令部 (CNRC) 指挥官修改 EB 计划的资格,并将责任委托给 CNRC。
¥1.0
2022 年
初步沟通 基于人工智能的车载自动列车障碍物距离估计 Ivan ĆIRIĆ*、Milan PAVLOVIĆ、Milan BANIĆ、Miloš SIMONOVIĆ、Vlastimir NIKOLIĆ 摘要:本文提出了一种新方法,利用图像平面单应性矩阵来改进对摄像机和成像物体之间距离的估计。该方法利用两个平面(图像平面和铁轨平面)之间的单应性矩阵和一个人工神经网络,可根据收集的实验数据减少估计误差。SMART 多传感器车载障碍物检测系统有 3 个视觉传感器——一个 RGB 摄像机、一个热成像摄像机和一个夜视摄像机,以实现更高的可靠性和稳健性。虽然本文提出的方法适用于每个视觉传感器,但所提出的方法是在热成像摄像机和能见度受损场景下进行测试的。估计距离的验证是根据从摄像机支架到实验中涉及的物体(人)的实际测量距离进行的。距离估计的最大误差为 2%,并且所提出的 AI 系统可以在能见度受损的情况下提供可靠的距离估计。 关键词:人工神经网络;自动列车运行;距离估计;单应性;图像处理;机器视觉 1 简介 通过遵循自动化趋势,可以大大提高铁路货运的质量和成本竞争力,以实现经济高效、灵活和有吸引力的服务。今天,自动化和自主操作已经在公路、航空和海运中变得普遍。现代港口拥有自动导引车 (AGV),可将集装箱从起重机运送到轨道旁、仓库、配送中心,而自动驾驶仪是航空公司和大型货船的标准配置,不需要大量机上人员。自动驾驶汽车和卡车的发展已经进入了一个严肃的阶段。此外,轨道交通自主系统的发展主要出现在公共交通服务领域(无人驾驶地铁线路、轻轨交通 (LRT)、旅客捷运系统和自动引导交通 (AGT))。基本思想是使用一定程度的自动化,将操作任务从驾驶员转移到列车控制系统(例如 ERTMS)。根据国际电工委员会 (IEC) 标准 62290-1,列车自主运行 (ATO) 是高度自动化系统的一部分,减少了驾驶员的监督 [1]。对于完全自主的列车运行,列车操作员的所有活动和职责都需要由多个系统接管,这些系统可以感知环境并俯瞰现场,检测列车路径上的潜在危险物体并做出相应的正确反应 [2-6]。障碍物检测系统作为 ATO 系统的主要部分,障碍物检测系统需要根据货运特定和一般用例(例如 EN62267 和/或自动化领域的相关项目)来监控环境。为了满足严格的铁路标准和法规,障碍物检测系统 (ODS) 应在具有挑战性的环境和恶劣的能见度条件下工作。ODS 是一种具有硬件和软件解决方案的机器视觉系统(图 1),用于提供有关铁路上和/或其附近障碍物的可靠信息,并估算从系统到检测到的障碍物的距离 [7]。该系统需要实时运行,并在不同的光照条件下运行(白天、
¥1.0







![初步沟通 基于人工智能的车载自动列车障碍物距离估计 Ivan ĆIRIĆ*、Milan PAVLOVIĆ、Milan BANIĆ、Miloš SIMONOVIĆ、Vlastimir NIKOLIĆ 摘要:本文提出了一种新方法,利用图像平面单应性矩阵来改进对摄像机和成像物体之间距离的估计。该方法利用两个平面(图像平面和铁轨平面)之间的单应性矩阵和一个人工神经网络,可根据收集的实验数据减少估计误差。SMART 多传感器车载障碍物检测系统有 3 个视觉传感器——一个 RGB 摄像机、一个热成像摄像机和一个夜视摄像机,以实现更高的可靠性和稳健性。虽然本文提出的方法适用于每个视觉传感器,但所提出的方法是在热成像摄像机和能见度受损场景下进行测试的。估计距离的验证是根据从摄像机支架到实验中涉及的物体(人)的实际测量距离进行的。距离估计的最大误差为 2%,并且所提出的 AI 系统可以在能见度受损的情况下提供可靠的距离估计。 关键词:人工神经网络;自动列车运行;距离估计;单应性;图像处理;机器视觉 1 简介 通过遵循自动化趋势,可以大大提高铁路货运的质量和成本竞争力,以实现经济高效、灵活和有吸引力的服务。今天,自动化和自主操作已经在公路、航空和海运中变得普遍。现代港口拥有自动导引车 (AGV),可将集装箱从起重机运送到轨道旁、仓库、配送中心,而自动驾驶仪是航空公司和大型货船的标准配置,不需要大量机上人员。自动驾驶汽车和卡车的发展已经进入了一个严肃的阶段。此外,轨道交通自主系统的发展主要出现在公共交通服务领域(无人驾驶地铁线路、轻轨交通 (LRT)、旅客捷运系统和自动引导交通 (AGT))。基本思想是使用一定程度的自动化,将操作任务从驾驶员转移到列车控制系统(例如 ERTMS)。根据国际电工委员会 (IEC) 标准 62290-1,列车自主运行 (ATO) 是高度自动化系统的一部分,减少了驾驶员的监督 [1]。对于完全自主的列车运行,列车操作员的所有活动和职责都需要由多个系统接管,这些系统可以感知环境并俯瞰现场,检测列车路径上的潜在危险物体并做出相应的正确反应 [2-6]。障碍物检测系统作为 ATO 系统的主要部分,障碍物检测系统需要根据货运特定和一般用例(例如 EN62267 和/或自动化领域的相关项目)来监控环境。为了满足严格的铁路标准和法规,障碍物检测系统 (ODS) 应在具有挑战性的环境和恶劣的能见度条件下工作。ODS 是一种具有硬件和软件解决方案的机器视觉系统(图 1),用于提供有关铁路上和/或其附近障碍物的可靠信息,并估算从系统到检测到的障碍物的距离 [7]。该系统需要实时运行,并在不同的光照条件下运行(白天、](/simg/4/4b79ebb2e692147077c5f05290fe6b1288b2aad1.png)