XiaoMi-AI文件搜索系统
World File Search System三段式

基于Q学习和三段式路径规划...
摘要:为实现连续机器人检测飞机油箱舱内缺陷的路径规划,提出一种基于Q学习和三段法的路径规划方法,规划出满足固有和空间结构约束要求的机器人位姿。首先,建立飞机油箱仿真模型,并对工作空间进行栅格化处理,降低计算复杂度;其次,应用Q学习算法,生成从起始点到目标点的路径,根据目标导引角和三段法得到路径上各个过渡点对应的关节变量;最后,通过逐步更新关节变量,使机器人到达目标点。进行仿真实验,结果验证了该算法的有效性和可行性。
富满微电子集团股份有限公司
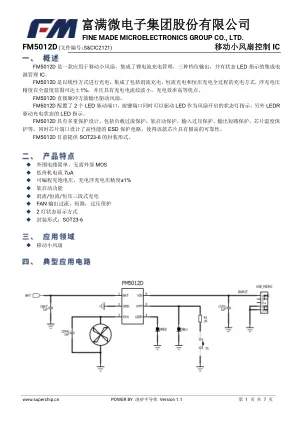
1.充电模式 FM5012D 用线性方式对电池进行涓流 / 恒流 / 恒压三段式充电。当电池电压低于 V TRKL 时进行涓流充 电;当电池电压高于 V TRKL 时进行恒流充电;当电池电压接近 V BAT-REG 时进行恒压充电,此时充电电流 开始逐渐减小,当电流减小到 I FULL 时,判断电池已经充饱,芯片终止充电,待电池电压降低到 V RECHG 后进行再次充电 (Recharge) 。 2.充电软启动功能 当开始给电池充电时,芯片会控制充电电流逐渐增大到设定值,避免了瞬间大电流冲击引起的各种 问题。 3.充电电流设定 充电电流由内部电路设定为恒流 600 mA, 涓流充电为 60mA, I FULL 为 90 mA 可编程设置充饱电压为 500 mA, 涓流充电为 50mA , I FULL 为 75 mA 当输入供电不足或芯片温度过高时, I IN-LIM 会下降。 4.充饱电压设定 FM5012D 芯片默认充饱电压值为 4.20V 可编程设置充饱电压值为 4.35V 5.输入过压保护 输入电压过高,超过 V IN-OVP 时,芯片会控制关闭充电和升压输出,防止芯片和负载因为过压而损 坏,输入电压正常后充电恢复,风扇驱动输出 FAN 不恢复。 6.充电限流保护 当芯片 VIN 端口电压低于 4.7V 时,芯片进入 VIN 限流状态,充电电流逐渐减小,直至到零。 SYMBOL PARAMETER CONDITIONS MIN TYP MAX UNITS