XiaoMi-AI文件搜索系统
World File Search System不设

海因茨曼 ELEKTRA KRONOS 30-M
15 带 Lambda 控制的 ELEKTRA 调试...................................................................................... 65 15.1 常规 IO 配置............................................................................................................... 65 15.2 CAN 通信............................................................................................................... 66 15.3 功能描述和配置....................................................................................................... 68 15.3.1 ELEKTRA 设定点.................................................................................................... 68 15.3.1.1 内部 Lambda 设定点......................................................................................... 68 15.3.1.2 外部 Lambda 设定点......................................................................................... 68 15.3.1.3 DcDesk2000 上的 Lambda 设定点............................................................. 69 15.3.1.4 DcDesk2000 上的燃气节流阀位置设定点............................................................. 69 15.3.1.5 安全备注......................................................................................................... 69 15.3.2 Lambda 控制参数........................................................................... 70 15.3.3 气体质量.............................................................................................................. 70 15.3.3.1 恒定气体质量............................................................................................... 70 15.3.3.2 可变气体质量............................................................................................... 70 15.3.4 发动机状态............................................................................................................. 71 15.3.5 气体燃料限制......................................................................................................... 73 15.3.5.1 固定启动燃料限制....................................................................................... 73 15.3.5.2 可变启动燃料限制....................................................................................... 73 15.3.5.3 速度相关燃料限制....................................................................................... 74 15.3.6 闭环 Lambda 控制............................................................................................. 74 15.3.7 安全功能............................................................................................................. 75

带数字控制器的循环浴槽操作员手册
如果高限值达到或超过控制温度设定点,显示屏上将闪烁 (E-H1)。如果发生这种情况,请输入更高的高限值或降低控制温度设定点。如果实际浴槽温度达到高限设定点,显示屏上将闪烁 (FLt 1)。如果发生这种情况,控制器将自动切断加热器的电源,在制冷/加热装置中,还将切断压缩机的电源。泵将继续运行。问题解决后(浴槽温度降低或高限值增加),按电源按钮清除消息。

2.2 量子操作和 Kraus-Stinespring 定理
考虑一个开放的量子系统,其相关的希尔伯特空间 H 的维数为 N 。设 ˆ ⇢ 描述其在给定初始时间的状态,设 ˆ ⇢ 0 为某个固定时间后的状态。设 T : B ( H ) ! B ( H ) 为连接这两个状态的映射。第一个观察结果是映射 T 必须是线性的。其原因在于第 1.1 节中介绍的密度矩阵的物理意义,以及“无知线性传播”的座右铭,这在经典和量子情况下都是有效的。如果一个系统处于状态 | 1 i 的概率为 p 1 ,处于状态 | 2 i 的概率为 p 2 ,并且如果 | 1 i 演变为 | 0
![[2] Jin-Yi Cai。“Shor 算法在存在噪声的情况下不会分解大整数”。引自:CoRR abs/2306.10072 (2023)。DOI:10.48550/arXiv.2306。](/simg/4\43cb60a445210abf2011bfcbf9093432832f64ee.png)
[2] Jin-Yi Cai。“Shor 算法在存在噪声的情况下不会分解大整数”。引自:CoRR abs/2306.10072 (2023)。DOI:10.48550/arXiv.2306。
该量在式 (1) 中作为 exp { 2 πi [ ... . . ] } 指数的子和出现。主要证明是证明指数和 (1) 中指数的和 (2) 在指数多项式中的典型情况下表现为足够随机的。然后我们使用以下引理引理[2]设 σ > 0 且 ξ m = e 2 πi/m 。设 X i ∼ N (0 , 1) ,其中 i = 1 , 2 , ... , n 是 iid 的,设 { S k ⊆ [ n ] | 1 ≤ k ≤ K } 是集合的有限集合。假设除了至多 δ 部分的成对对称差 S j ∆ S k 之外,所有差集的基数均为 ≥ ( m/σ ) 2 t (其中 j ̸ = k )。令 Σ k = φ k + σ P i ∈ S k X i ,其中 φ k ∈ [0 , 2 π ) 。然后,期望
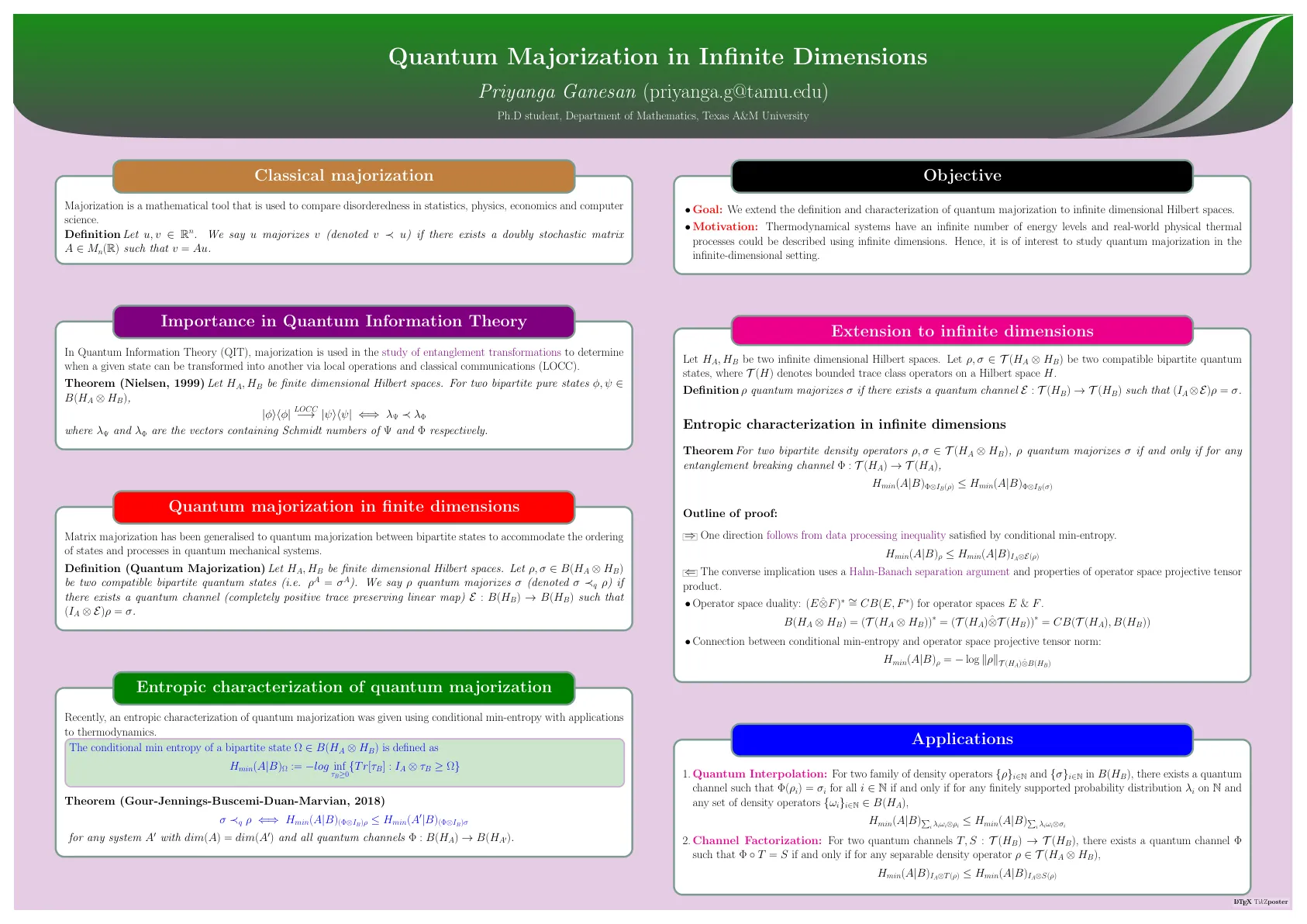
无限维度中的量子主导
定义(量子主导) 设 HA , HB 为有限维希尔伯特空间。设 ρ, σ ∈ B ( HA ⊗ HB ) 为两个兼容的二分量子态(即 ρ A = σ A )。如果存在一个量子通道(完全正的迹保持线性映射) E : B ( HB ) → B ( HB ) 使得 ( IA ⊗E ) ρ = σ ,则我们称 ρ 量子主导 σ (表示为 σ ≺ q ρ )。

InVue® 集成流量控制器 6550 型
InVue 集成流量控制器 6550 型采用独特的 PTFE 阀膜片,可控制大容量流体流量。利用最新的电动阀和流量计技术,封装的内部电子元件可控制流量控制器的各个方面。该产品由设定点信号(例如 4 – 20 mA、0 – 10 VDC)激活,以将流体流量保持在所需的设定点。
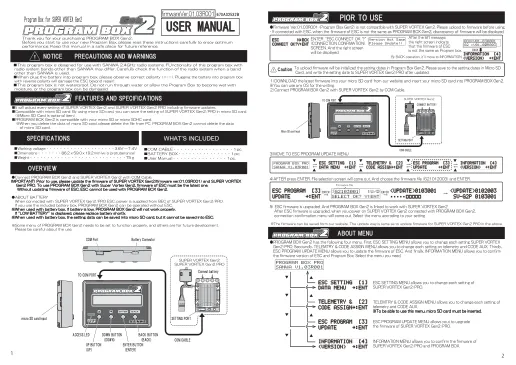
程序盒 GEN2pro_ENG_MANUAL.pdf
・CODE AUX MENU (06) AUX1CODE01・・・工厂编程设置为 SUPER VORTEX Gen2/PRO 的 MODE 5(油门冲击)。 (07) AUX1CODE02・・・工厂编程设置为 SUPER VORTEX Gen2/PRO 的 MODE 6(空挡制动率)。 (08) AUX1CODE03・・・工厂编程设置为 SUPER VORTEX Gen2/PRO 的 MODE 7(驾驶感觉)。 (09) AUX1CODE04・・・工厂编程设置为 SUPER VORTEX Gen2/PRO 的 MODE 8(空挡制动感觉)。 (10) AUX1CODE05・・・工厂编程设置为 SUPER VORTEX Gen2/PRO 的 MODE 9(制动感觉)。 (11)AUX1CODE06・・・工厂设定为 SUPER VORTEX Gen2/PRO 的 MODE 10(增压率)。 (12)AUX1CODE07・・・工厂设定为 SUPER VORTEX Gen2/PRO 的 MODE 11(涡轮)。 (13)AUX1CODE08・・・工厂设定为 SUPER VORTEX Gen2/PRO 的 MODE 12(增压起始转速)。 (14)AUX1CODE09・・・工厂设定为 SUPER VORTEX Gen2/PRO 的 MODE 13(增压加速度)。 (15)AUX1CODE10・・・工厂设定为 SUPER VORTEX Gen2/PRO 的 MODE 14(中性死区)。

关于给定色数图中奇数圈的加强
我们遵循 [9, 13] 中的符号。设 G 为图。对于 V(G) 的非平凡划分 (A,B),1如果路径 P 的一端在 A 中而另一端在 B 中,则我们称路径 P 为 A - B 路径。设 P 为图 G 中的一条路径。设 | P | 为 P 中的边数。如果 | P | 为偶数(分别为奇数),则我们称 P 为偶数(分别为奇数)。设 C 为按循环顺序具有顶点 v 0 ,v 1 ,...,vt − 1 的环。设 C i,j 表示 C 的子路径 vivi +1...vj,其中索引取自加法群 Z t 。设 H 为 G 的子图。如果顶点 v ∈ V ( G ) − V ( H ) 在 G 中与 V ( H ) 中的某个顶点相邻,则我们称 H 和顶点 v ∈ V ( G ) − V ( H ) 在 G 中相邻。设 NG ( H ) = S v ∈ V ( H ) NG ( v ) − V ( H ) 且 NG [ H ] = NG ( H ) ∪ V ( H )。对于 S ⊆ V ( G ),如果 V ( G ′ ) = ( V ( G ) − S ) ∪{ s } 且 E ( G ′ ) = E ( G − S ) ∪{ vs : v ∈ V ( G ) − S 与 G 中的 S 相邻 } ,我们称图 G ′ 是通过将 S 收缩为顶点 s 而从 G 得到的。如果 G − v 包含至少两个分支,则连通图 G 的顶点 v 是 G 的割顶点。 G 中的块 B 是 G 的最大连通子图,使得不存在 B 的割顶点。注意块是孤立顶点、边或2连通图。G 中的端块是 G 中最多包含一个 G 的割顶点的块。如果 G 是图并且 x, y 是 G 的两个不同顶点,我们称 ( G, x, y ) 为有根图。有根图 ( G, x, y ) 的最小度为 min { d G ( v ) : v ∈ V ( G ) −{ x, y }} 。如果 G + xy 是2连通的,我们还称有根图 ( G, x, y ) 是2连通的。我们称 k 条路径或 k 条循环 P 1 , P 2 , . . . , P k 为