XiaoMi-AI文件搜索系统
World File Search System井选

8-9P 吉井勇 4.ai
1934 年至 1937 年间,Isamu 在伊诺诺隐居。 Isamu之所以选择这里,是因为他喜欢伊诺诺市的自然风光和当地的人民,伊诺诺市的人民也喜欢Isamu并欢迎他。 即使在 Isamu 回国后,Inono 的人们仍然无法忘记他,并开始努力为他的诗立一座纪念碑。 1994年,当地居民在井野地区竖立了13座纪念碑,在长濑地区竖立了2座纪念碑。纪念碑的石头是由根须的小松石工所捐赠的。诗句是从勇在伊诺诺时创作的约2300首诗中选出的,由伊诺诺的各个小组选定,并在小组长会议上确定。如果参观完这些古迹,就可以一次性游遍伊诺诺市。 希望大家能够借此机会参观刻有吉井勇诗歌的纪念碑,并通过他的诗歌了解井野市的自然美景、山区生活以及当地人民的热情好客。

AI x 设计井上光和
1) https://aws.amazon.com/jp/ 2) https://cloud.google.com/products/ai/ 3) https://www.ibm.com/watson/ 4) https://azure.microsoft.com/ja-jp/services/cognitive-services/ 5) https://trends.google.co.jp/trends/ 6) https://colab.research.google.com/ 7) http://jupyter.org/ 8) https://www.anaconda.com/ 9) http://archive.ics.uci.edu/ml/datasets/Iris 10) http://lib.stat.cmu.edu/datasets/boston 11) https://archive.ics.uci.edu/ml/datasets/wine+quality 12) http://yann.lecun.com/exdb/mnist/ 12) http://megaface.cs.washington.edu/ 14)ReLU(Ramp函数):激活函数之一。当输入值为0以下时,变为0,当大于1时,则按输入原样输出。 15)Softmax函数:将判断结果以百分比的形式输出到输出层的各个单元。一般取百分比最高者作为答案。 16)铃木隆宏,《工作的消失》,讲谈社,2017,第76页 17)新井纪子,《人工智能与不会读教科书的孩子》,东洋经济,2018年 18)小川宏,《中小学编程教育及其在地区的实践》,日本艺术设计协会期刊第77期,2018年,第50-51页 19)迈克尔·施密特、Hod Lipson,《从实验数据中提炼自由形式的自然法则》,2009年,《科学》第324卷 计算机从摆动的钟摆的运动中推导出运动定律。 20)大脑中的侏儒:脑外科医生彭菲尔德绘制的图表,显示了人类大脑皮层的运动区和体感区与身体各部位之间的对应关系。
Tomoki Fujii(Fujii Tomoki),2025年1月...
35。T. Fujii和D. Roland-Holst(2008)“越南对世界贸易组织的加入如何改变贫困的空间发病率?”在全球化和亚洲的穷人中:共享的增长可以维持吗?,由M. Nissanke和E. Thorbecke编辑。pp。47-89。Palgrave Macmillan。[工作文件版本:世界银行政策研究工作文件4521]
单纯井
Sumplex Wellness从事业务已有30多年的历史,开创了员工健康和健康在工作场所的作用。他们为雇主群体提供了全面的服务,以增强人们的健康和福祉。Sumplex Wellness以其动手,积极主动的方法来满足客户需求而感到自豪。通过虚拟能力在费城和周围地区和周围地区为客户提供服务。Primary contact Lauren Shelly ibcwellness@simplexwellness.com Website www.simplexwellness.com Areas of Focus: Select to view available programs Be Active Be Nourished Be Energized Be Empowered Biometric Screenings Challenges Wellness Fairs/Days Turnkey and Value-Added Services


通过控制和设计共选
软机器人利用合规的材料以灵活的方式与复杂和不确定的环境相互作用,从而可以操纵脆弱的物体并与生物的安全相互作用。它们的适应性推动了医学和制造等领域的创新。设计软机器人即使对于经验丰富的设计师,由于其非线性材料,多物理耦合,多个身体与环境之间的复杂相互作用及其许多自由度,即使对于经验丰富的设计师来说也很具有挑战性。这解释了为什么软机器人技术中的第一批设计受到自然的启发,模仿了诸如蠕虫或章鱼之类的软动物。软体能够符合硬对象并重新配置DI FF任务,然后将控制的重要部分委派给身体。与刚性机器人不同,体现的智能仍然是软机器人技术中的新兴话题。但是,很明显,可以很好地适应其环境的代理商可以快速学习智能行为。本文摆脱了传统的训练控制和敏捷性的关注,旨在通过将人工智能与软机器人设计联系起来来应对控制挑战。软机器人技术领域在建模,控制和设计方面提出了许多挑战。Inria Lille的除霜团队已经开发了几种有限元方法(FEM)的工具来应对这些挑战,从而可以准确地模拟软机器人。这些工具已用于低级控制,并在制造前评估了软机器人设计。此探索需要解决一些挑战。在这项工作中,应用了各种基于FEM的仿真和数值优化工具来探索软机器人的计算设计。设计空间必须非常大,才能探索相关的设计,但也受到了足够的限制,以使优化问题可以解决。开发相关的数学适应性功能对于准确评估软机器人设计的性能和效果至关重要。鉴于计算设计算法的重要数据要求和准确模拟的计算费用,我们旨在通过选择平衡计算时间和准确性的模型或使用学习技术来加速FEM模拟来加快模拟的速度。本论文探讨了软机器人的计算设计,重点是对数值结果的模拟到真实性。解决了两个参数软操作器的设计优化,一个具有嵌入式传感器,另一个具有自动接触功能。随着控制任务,环境和设计空间变得更加复杂,计算负担增加。这激发了从FEM模拟中学到的替代模型的发展,以表征软机器人的设计和控制。通过各种情况证明了该模型的适用性,特别是对气动操纵器的嵌入式控制和软操作器的计算设计。此外,这项工作的一个关键目标是开发工具以选择软机器人设计和控制。

水禽盲选程序
2018 年 9 月 3 日,将在 Somerville 湖办公室随机抽取水禽遮蔽物。随机抽取卡片上的个人将收到电子邮件通知,并必须于 2018 年 9 月 12 日晚上 7:00 在 Somerville 湖办公室开会,选择水禽遮蔽物位置并填写所需表格。未能参加会议的个人将丧失选择水禽遮蔽物位置的机会。遮蔽物选择将按照随机抽取卡片的顺序进行。将允许两名个人参加选择会议。第一个人是随机抽取卡片上的个人,此人在选择水禽遮蔽物位置之前必须出示有效的驾驶执照或州身份证,并选择遮蔽物位置。第二个人只能作为替补参加,并将在许可证上以替补身份签字。被选中遮蔽物的个人将被收取 50.00 美元的不可退还费用,这是在选择会议上选择遮蔽物时必须支付的费用。此费用必须以个人支票、银行本票或汇票的形式支付,不接受现金。选定水禽隐蔽位置后,可以随时开始建造隐蔽处。所有水禽隐蔽处必须在狩猎季结束后 30 天内拆除。如有任何问题或意见,请联系 Ranger Russell Meier(狩猎协调员),电话:979-596-1622。首都地区办事处工作人员及其直系亲属不得参加这些狩猎活动。访问以下链接 ( http://www.swf- wc.usace.army.mil/somerville/Information/Maps.asp ) 并单击鸭子隐蔽狩猎地图,即可找到隐蔽位置地图。
井考时间表
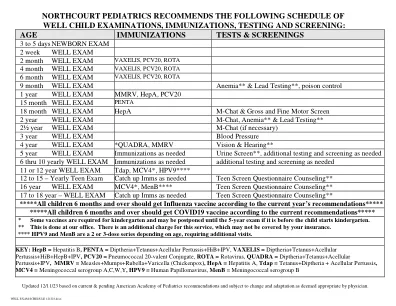
KEY: HepB = Hepatitis B , PENTA = Diptheria+Tetanus+Acellular Pertussis+HiB+IPV, VAXELIS = Diptheria+Tetanus+Acellular Pertussis+HiB+HepB+IPV , PCV20 = Pneumococcal 20-valent Conjugate, ROTA = Rotavirus, QUADRA = Diptheria+Tetanus+细胞百日咳+IPV,MMRV =麻疹+腮腺炎+风疹+vricella+vricella(chirpox),hepa =肝炎A,TDAP = TETAP = TETANUS+DIPTHANUS+diptheria+Acellular+acellular+cucv4 = mcv4 = meningoccal serogroup a,meningoccal serogroup a,meningoccal a,men cophom a,c,y,y,y,y,y,y,y,y,y,y,y,y,y,y,y,y,y,y,y,y,y,y,y,y,y,脑膜菌血清群B