XiaoMi-AI文件搜索系统
World File Search System亮度

人工智能双镜头 Wi-Fi 摄像头
新款 C3X 2K + 继承了其前身——屡获殊荣的 C3X 的核心双镜头设置,能够以 2K + 分辨率呈现更清晰的图像,细节丰富。该摄像机使用一个镜头捕捉环境亮度,另一个镜头捕捉颜色数据。通过应用 EZVIZ 的专有算法,两个图像合并为一个细节丰富、色彩逼真的最终图像。
诺瓦LCT
6.1.1 设置在线校正参数 ...................................................................................................................................................... 42 6.1.2 获取平均校正系数 ...................................................................................................................................................... 43 6.1.3 管理校正系数 ...................................................................................................................................................... 44 6.1.4 管理双重校正系数 ............................................................................................................................................. 48 6.2 调整亮度 ...................................................................................................................................................................... 50 6.3 校正较亮像素 ............................................................................................................................................................. 54 6.4 设置高级色彩 ............................................................................................................................................................. 56 6.5 调整屏幕效果 ............................................................................................................................................................. 59 6.6 设置 Image Booster Engine(适用于 Windows 7) ............................................................................................................. 60
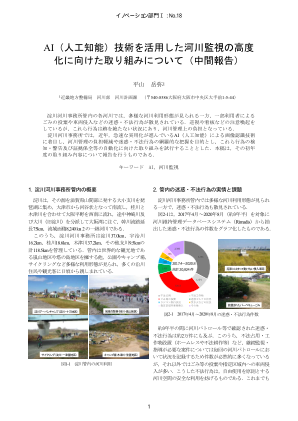
旨在利用AI(人工智能)技术改善河流监测......
然而,对于人或黑色和绿色垃圾袋没有任何反应。因此,我们决定进行一项研究,以提高夜间检测精度。 为了提高检测精度,我们决定使作为检测目标的图像更清晰。为了提高可视性,可以对设备本身进行改进或更换,例如安装图像锐化装置或引入可以夜间监控的红外摄像机。但缺点是每台初始投资为数十万日元至数百万日元。另一方面,有一种方法使用图像处理技术来锐化现有闭路电视摄像机拍摄的图像。该方法的模型构建成本为数万日元至数十万日元,通过将其纳入使用 CNN 模型的检测工作的第一阶段,有望实现图像锐化并提高检测精度。相机图像锐化模型。 伽玛 (γ) 校正是锐化夜间摄像机图像的图像处理技术之一。该技术利用伽马值(表示图像灰度响应特性的数值)将图像的亮度和灰度校正为最适合人类观看的值,也用于再现亮度和暗度。我们构建了一个实现该技术的图像锐化模型,锐化闭路电视摄像机图像和检测 CNN 模型的结果如图 4-8 所示。
推广包 卡斯珀活动中心
索具:卡斯珀活动中心的天花板采用完全裸露的铁桁架和单层走道系统。天花板到地板的高度为 87.6 英尺,索具的可能性几乎是无限的。对于满座音乐会,竞技场东端的网格标准重量限制为 32,000 磅。*对于剧院和半场音乐会表演,中心网格允许悬挂多达 12,000 磅*。对于剧院表演,电动绞盘系统可提供多达 15 组线组,每组可承受高达 1,000 磅的重量。 *这些重量能力是标准的。根据建筑物的积雪量,最多可悬挂 100,000 磅。超过 32,000 磅的重量必须得到城市工程师的批准。照明:一般:竞技场照明由六 (6) 个不可调光电路上的 108 个 1KW 汞蒸气灯和 16 个 1KW 白炽灯提供。竞技场地板上方的亮度可达到 90 英尺烛光。在竞技场地板上方第 35 排,亮度降低到 40 英尺烛光。色温约为 4,400 ° 开尔文。剧场照明:提供适度的剧场照明套件,包括以下设备:

光照不变的物体分割
常见的通用分割方法会因照明突然变化而受阻。由于打开灯而导致的亮度显著增加以及物体投射的阴影通常会导致这些方法产生错误的分类。为了实现照明不变分割,本文讨论的共线向量模型从局部像素邻域构建 RGB 颜色向量。亮度变化只会对这些向量的长度产生标量值的影响。因此,可以采用正交距离测量来确定照明不变下的局部颜色相似性。在存在加性噪声的情况下,通过找到从向量到未知无噪声信号的最小正交距离来估计向量共线。距离最小化可以定义为最小特征值问题。该最小值被纳入贝叶斯框架,从而允许最大化决策的后验概率 (MAP)。将结果值与静态和自适应阈值进行比较。分类标签被认为是通过马尔可夫随机场 (MRF) 采样的,以对像素相互依赖性进行建模。相应的能量函数定义为证据在空间邻域上的积分。这会导致前景蒙版的空间紧凑性和平滑边缘。使用 PETS 2001 数据集和特定照明测试集来衡量性能。

TM1934-规格表下载.pdf
低功耗CMOS工艺 OUT输出口耐压24V VDD内置5V稳压管,串联电阻后支持6-24V电压 15mA固定恒流输出 PWM亮度控制电路,256级亮度控制 精确的电流输出值 最大误差(通道间):±3% 最大误差(芯片间):±5% 单线串行级联接口 单线两通道串行级联接口:芯片数据接口可以通过命令配置DI或者FDI引脚输入,正常模式下输入接口互相切换,DI工作模式下DI引脚输入数据,FDI工作模式下FDI引脚输入数据,D0引脚转发级联数据,该信号不会因为某一芯片的异常而影响其它芯片的正常工作 振荡方式:内置RC振荡,根据数据线上的信号进行时钟同步,在接收到当前单元的数据后自动重新生成后续数据并通过数据输出端送到下一级,信号不随级联距离的增大而失真或衰减 内置上电复位电路,上电复位后所有寄存器均清零初始化 数据传输速率800KHz 封装方式:SOP8和SOT23-8

激光和基础科学的光学
激光器和光学元件用于基础科学和应用科学劳伦斯·利弗莫尔国家实验室(LLNL)设计,建造和运营一系列由国家安全需求驱动的基本和应用科学的大型且复杂的激光设施。这些激光器在激光能量,功率和亮度中创造了世界纪录。这种奇异能力使开创性的科学,包括2022年12月5日实验室中融合点火的首次成就。


以三维为特征的显示调光模型...
摘要:自发光显示设备在各种工作环境中必不可少,例如飞机驾驶舱以及车辆和火车的驾驶室,这些环境中的外部光环境变化很大。由于光照变化很大,根据环境光照自动调节显示亮度对于驾驶员高效舒适地工作是必要的。本研究提出了一种基于人体工程学测试三个维度的显示调光模型,包括视觉性能(VP)、视觉舒适度(VC)和视觉疲劳(VF)。本实验展示了五种环境照度,每种环境照度与五种显示亮度水平相结合,共形成 25 种条件。采用受试者内设计,十位观察者体验了所有组合条件。实验采用 Anfimov 表测试 VP、VC 量表评估 VC 和 VF 量表评估 VF。根据实验结果,构建子模型以阐明每个维度(VP、VC 和 VF)的特征。随后,采用层次分析法,计算各维度在总分中的权重,构建评价体系。最后,利用指数拟合,构建大范围显示调光模型,明确描述复杂光环境匹配的内在联系。© 作者。由 SPIE 在 Creative Commons Attribution 4.0 Unported License 下发布。在 who 中分发或复制此作品
诺瓦LCT
6.1 校准 ................................................................................................................................................................................ 30 6.1.1 设置在线校准参数 ................................................................................................................................................ 30 6.1.2 获取平均系数 ................................................................................................................................................ 31 6.1.3 管理校准系数 ................................................................................................................................................ 32 6.1.4 管理双重校准系数 ............................................................................................................................................. 35 6.2 调整亮度 ................................................................................................................................................................ 37 6.3 校正较亮像素 ............................................................................................................................................................. 42 6.4 设置高级色彩 ............................................................................................................................................................. 44 6.5 调整屏幕效果 ............................................................................................................................................................. 47 6.6 设置图像增强引擎 ............................................................................................................................................. 48 6.6.1 屏幕校准........................................................................................................................................... 48 6.6.2 快速设置 ................................................................................................................................................ 54