XiaoMi-AI文件搜索系统
World File Search System传感器包

发展深海与太空研究之间的技术协同作用
机器人设计、自主性和传感器集成方面的最新进展为探索深海环境创造了解决方案,这些解决方案可转移到冰冷卫星的海洋中。海洋平台尚未具备其太空同类(例如最先进的火星毅力号探测器任务)的任务自主能力,尽管不同级别的自主导航和测绘以及采样是一种现存能力。在这种情况下,它们日益仿生的设计可能允许进入复杂的环境场景,并配备新颖、高度集成的生命检测、海洋学和地球化学传感器包。在这里,我们通过与三个主要研究领域的空间技术的协同作用,展望了深海机器人技术即将到来的进步:仿生结构和推进(包括电力存储和发电)、人工智能和合作网络以及生命检测仪器设计。新的形态和材料设计,以及小型化和更分散的传感器包,将推动机器人传感系统的发展。控制导航和通信的人工智能算法将允许通过合作网络进一步发展行为仿生。解决方案必须在有线天文台、中微子望远镜和海上工业场地的基础设施网络中进行测试,其议程和模式超出了我们的工作范围,但可以从固定和移动平台操作组合的提议示例中汲取灵感。

评估和提高气体的可靠性... - AMT - 最近
摘要:环境监测技术的进步使相关社区和公民能够收集数据,以更好地了解当地环境和潜在暴露情况。这些移动、低成本的工具可以提高收集时间和空间分辨率的数据,提供具有前所未有的详细程度的大规模数据。这种类型的数据有可能使人们能够就其暴露情况做出个人决定,并支持制定减少污染和改善健康结果的当地战略。然而,这些低成本仪器的校准一直是一个挑战。通常,传感器包是通过现场校准来校准的。这涉及将传感器包与高质量参考仪器共置一段时间,然后应用机器学习或其他模型拟合技术(如多元线性回归)来开发用于将原始传感器信号转换为污染物浓度的校准模型。虽然这种方法有助于校正环境条件(例如温度)的影响以及与非目标污染物的交叉敏感性,但越来越多的证据表明,由于污染物水平与环境条件(包括昼夜循环)之间存在偶然相关性,校准模型可能会过度拟合给定位置或一组环境条件。因此,在现场训练的传感器包在移动或转移到其他位置时可能会提供不太可靠的数据。对于寻求在监管监测点以外进行监测的应用(例如个人移动监测或高分辨率的社区监测),这是一个潜在的问题。
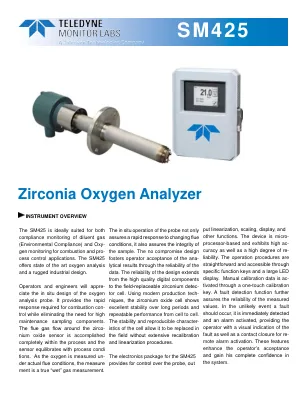
氧化锆氧气分析仪 - AyT - 环境与技术
高温选项允许 SM425 用于测量和控制均热炉和再热炉中的氧气水平,或样品气体温度高于 1100°F 但低于 2500°F 的其他位置。此选项包括经过修改的 SM425,带有碳化硅或不锈钢探头,允许样品气流通过位于管道外部的检测器。使用此选项,传感器位于烟气遏制管道外部,但与烟囱紧密耦合。这可确保样品运输路径最小化,并且无需采样或调节设备。气动喷射器或自然通风用于促进样品在外部安装的传感器包周围流动,并允许在存在负压烟道条件的情况下使用高温装置。

评估和提高天然气的可靠性... - NSF PAR
摘要。环境监测技术的进步使相关社区和公民能够收集数据,以更好地了解当地环境和潜在暴露情况。这些移动、低成本的工具可以提高收集时间和空间分辨率的数据,提供具有前所未有的详细程度的大规模数据。这种类型的数据有可能使人们能够就其暴露情况做出个人决定,并支持制定减少污染和改善健康结果的当地战略。然而,这些低成本仪器的校准一直是一个挑战。通常,传感器组是通过现场校准来校准的。这涉及将传感器组与高质量参考仪器放在一起一段时间,然后应用机器学习或其他模型拟合技术(如多元线性回归)来开发用于将原始传感器信号转换为污染物浓度的校准模型。尽管这种方法有助于校正环境条件(例如温度)的影响以及与非目标污染物的交叉敏感性,但越来越多的证据表明,由于污染物水平与环境条件(包括昼夜循环)之间存在偶然相关性,校准模型可能会过度拟合给定位置或一组环境条件。 因此,在现场训练的传感器包可能会提供

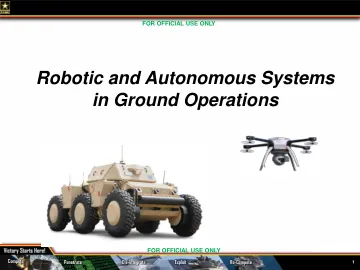
小型无人机在网络中心战中的应用
实时详细信息对于地面作战部队的成功至关重要。目前的有人侦察、监视和目标捕获 (RSTA) 能力不足以弥补战场情报空白、提供超视距 (BLOS) 瞄准以及在敌对情况下、复杂地形和在城市地形中开展军事行动所需的伏击避免信息。美国陆军已经开发了一个名为“作战部队联网传感器 (NSfCF)”的计划,旨在开发一种先进的联网无人/无人值守传感器系统,该系统可以监视空白并为指挥官提供实时相关信息。通过使用联网无人传感器对空白进行远程监控,NSfCF 将增加部队的覆盖范围,并为指挥官提供有机资产,以完成他的战场态势感知 (BSA) 图像,用于直接和间接火力武器、预警和威胁避免。 NSfCF 项目整体上正在使用先进的传感器技术为无人地面车辆、小型无人飞行器 (SUAV) 和无人值守地面传感器开发传感器包。本文将重点介绍 SUAV 作为一种资产的作用,它由集成侦察监视和目标获取中心车辆控制,充当扩展范围传感器,提供超视距视频数据,以便及时检测、识别、确认和定位威胁。还将审查 SUAV 快速响应任务变化的能力,例如评估来自一系列联网无人值守地面传感器的警报。讨论还将包括 NSfCF 如何开发和评估便携式小型无人飞行器 (SUAV) 的传感器技术,并展示 SUAV 如何能够从可重新分配任务的机载传感器平台为地面指挥官提供实时视频,以进行侦察、监视、定位和本地安全。本文还介绍了所用飞机的类型、各种传感器有效载荷和传感器限制、小型无人机特定的图像处理以及作为网络中心枢纽的一部分而获得的任务灵活性。现场试验的评估/结论将包括经验教训以及这些经验教训如何导致对飞机状态数据、传感器、数据链路、数据格式、有效载荷容量、功能、地面站处理和可靠性的要求。
使用 COTS 光谱光度计检测极光弧......
极光现象本质上是动态的:观测到的事件具有丰富的结构,在空间和时间上都很复杂,具有科学上有趣的特征。虽然使用 CCD 或全天相机进行光学极光观测很常见,但极光在无线电频率 (RF) 下也具有有趣的发射特性,特别是在低频和高频波段。极光发射无线电观测器 (AERO) 是一颗 6U 立方体卫星,配备了新型电磁矢量传感器 (VS) 天线。VS 将瞄准 100 kHz - 15 MHz 测量波段内的极光发射,这使得人们能够研究有趣的发射类型,例如极光千米辐射 (20 kHz -750 kHz)、中频爆发 (1.6 MHz - 4.4 MHz) 和回旋加速器发射 (2.8 MHz - 3.0 MHz)。 VS 天线从立方体卫星框架展开后,两端之间的距离为 4 米,并展开形成电偶极子和磁环天线,这些天线的灵敏度足以探测这组不同的科学目标。拥有太空平台(例如 AERO 的矢量传感器天线)可将探测器定位在电离层等离子体频率之上,否则会限制对无线电发射的观测。AERO VS 天线的新测量需要一组背景数据来验证所得数据产品的保真度。AERO 包括一个称为辅助传感器包 (ASP) 的辅助有效载荷,它将使用背景光学和磁数据增强 VS 测量。AERO 背景光学测量的目标是检测多个光谱带中极光发射的存在,即 557 nm 的绿线发射和 630 nm 的红线发射。选择 AMS AG AS7262 6 通道可见光波段光谱光度计作为光学传感器。我们提出了一个辐射测量模型,用于评估 AS7262 传感器测量目标极光事件的能力。我们考虑了许多不同的测试场景,包括不同的参数,例如以瑞利为单位的极光源辐射度、航天器
![arXiv:2301.12244v1 [physics.ins-det] 2023 年 1 月 28 日](/simg/5\53cad4028c1e90ff996137e7966171a403a89757.webp)
arXiv:2301.12244v1 [physics.ins-det] 2023 年 1 月 28 日
单片有源像素传感器 (MAPS) [ 1 ] 将传感器包含在与电子元件相同的 CMOS 基板中,它具有工业标准 CMOS 处理的所有优点,避免了粒子物理实验中常用的凸块键合混合像素传感器的生产复杂性和高成本,因此特别具有吸引力。今天,MAPS 代表着一项成熟的技术,其性能可与混合硅像素传感器相媲美。事实上,MAPS 已经在大型 LHC 实验中使用[ 2 ]。CERN 高亮度 LHC 项目期间预计将出现大量事件堆积,这需要几十皮秒的计时能力[ 3 ]。这种计时水平将在 ATLAS [ 4 ] 和 CMS [ 5 ] 升级探测器中通过大约 1 毫米粗空间粒度的计时层实现。在开发这项成熟技术的同时,粒子物理学界正在尝试为未来项目开发具有高空间分辨率和同等计时能力的硅传感器。在 [6] 中可以找到对当前这方面努力的最新回顾。该研究小组正在尝试开发具有皮秒时间能力的 MAPS。利用商用 SG13G2 IHP 130 nm 工艺 [7],我们制作了一系列单片原型,这些原型具有速度极快且噪声极低的 SiGe HBT 前端电子器件,使用没有内部增益层的标准 PN 结传感器可实现低至 36 ps 的时间分辨率 [8-12]。这条研究路线源于 MONOLITH H2020 ERC Advanced 项目 [13],该项目利用新型多 PN 结 PicoAD 传感器 [14],通过连续深增益层提供的信噪比增强实现皮秒级的时间分辨率。[15] 和 [16] 报告了使用 PicoAD 概念验证单片原型获得的结果。最近,MONOLITH 项目的第二个单片硅像素矩阵原型采用 SG13G2 IHP 工艺生产。ASIC 包含 [ 12 ] 前端电子器件的改进,旨在提高操作能力。在制造实现增益层的特殊 PicoAD 晶圆的同时,还使用厚度为 50 µm 的外延层晶圆(电阻率为 350 Ω cm)生产了带有标准 PN 结传感器的版本。在本文中,我们展示了使用不带内部增益层的第二个 MONOLITH 原型获得的测试光束结果。