XiaoMi-AI文件搜索系统
World File Search System传真件

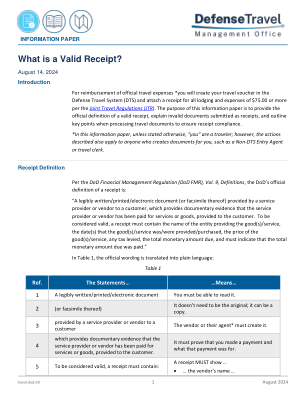
湿件中的神经形态工程:最新进展及其前景
联合国大会(2015 年)制定了一项议程,其中包含 17 个目标,需要在全球范围内到 2030 年实现,以促进可持续的未来。实现这些目标需要设计和实施更有效的战略来管理复杂系统,包括人类及其社会、世界经济、城市地区、自然生态系统和气候(Gentili,2021a)。一项有前途的战略,即正在蓬勃发展的战略,依赖于人工智能 (AI) 和机器人技术的发展。人工智能帮助人类收集、存储和处理监测复杂系统不断演变所需的大数据(Corea,2019 年)。人工智能还帮助我们下定决心控制复杂系统的行为。硬机器人和软机器人让人类能够进入原本无法进入的环境。例如,它们帮助我们(1)研究其他行星的地球化学特征、考察海洋深渊以发现新的贵重材料和能源矿藏;(2)进入人体内部器官进行侵入性较小的手术;(3)在肮脏或危险的地方工作。开发人工智能的主要传统方法有两种(Lehman 等人,2014 年;Mitchell,2019 年)。第一种方法是编写在基于冯·诺依曼架构的电子计算机上运行的“智能”软件,该架构的主要缺点是处理单元和存储单元在物理上是分开的。一些软件模仿严谨的逻辑思维,而另一些软件模仿神经网络的结构和功能特征来学习如何从数据中执行任务。开发人工智能的第二种方法是在神经假体的硬件中实现人工神经网络,或设计类似大脑的计算机,将处理器和内存限制在同一空间中(所谓的内存计算;Sebastian 等人,2020 年)。如果人工神经网络由硅基电路或无机忆阻器制成,则它们是刚性的;如果基于有机半导体薄膜,则它们是柔性的(Christensen 等人,2022 年;Lee and Lee,2019 年;Wang 等人,2020 年;Zhu 等人,2020 年)。它们可以采用三种不同的架构进行设计:(A1)前馈(具有可训练的单向连接)、(A2)循环(具有可训练的反馈动作)或(A3)储层(由未训练的非线性动态系统与可训练的输入和输出层耦合而成)网络(Nakajima,2020 年;Tanaka 等人,2019 年;Cucchi 等人,2022 年;见图 1A)。在过去十年左右的时间里,一种开发人工智能的新颖而有前途的策略被提出:它包括通过湿件(即液体)中的分子、超分子和系统化学来模仿人类智能和所有其他生物所表现出的智能形式
学科国内委托教育(系统管理相关)网络...
防卫省情报本部网站(https://www.mod.go.jp/dih/service.html)〒162-8806 东京都新宿区市谷本村町5-1 防卫省情报本部总务部会计课(联系人:高田)电话:03-3268-3111(内线31752)直拨传真:03-5225-9641
1 加入以下开放反对主题列表
2022 年 6 月 21 日 — 国防部竞赛。资格。货物销售。D 或以上。详细分类。规格等。...零件编号或规格。所用设备的名称。21TB1AN0206。0001。GE021269390。
物流管理2023电话:021 808 3911传真
13078 714供应管理(出站)课程目标学生将学习主题的语言,并配备通常在组织供应链的出站部分中发现的相关实践(交付和返回)。模块的交付部分将绘制出出站供应链配置的主要类型。它将考虑过程集成要求并绘制理想过程流;进行业务流程分析和简化,并涵盖过程控制和质量管理。交付部分涵盖了管理仓储,包装和材料处理活动(设施管理)以及协调产品交付(运输服务提供商)所需的基本要素。提供了使用相关文档来有效管理交货的概述。还涵盖了海上物流的核心方面。在模块的返回部分中,考虑了最大程度地减少物流环境影响和浪费的实践,并解释了产品回报管理和反向物流实践。
传真此页面 - 密西西比州医疗补助部 - |女士Gov
59 4'11“ 124 124 133 138 143 148 153 158 158 163 168 168 173 178 183 183 188 193 198 203 203 208 208 212 212 217 222 227 232 232 237 237 237 237 242 60 5'0 132 137 143 148 153 158 164 169 174 180 185 190 190 2012 206 211 211 211 217 222 222 227 232 238 238 243 248 248 254 259 62 5'2 5'2 163 169 175 180 186 191 197 203 208 214 220 225 231 237 242 248 254 259 265 270 278 64 5'4" 145 151 157 163 169 174 180 186 192 197 204 209 215 221 227 232 238 244 250 256 262 267 273 279 285 65 5'5" 150 156 162 168 174 180 186 192 198 204 210 216 222 228 234 240 246 252 258 264 270 276 282 288 294 66 5'6" 155 161 167 173 179 186 192 198 204 210 216 223 229 235 241 247 253 260 266 272 278 284 291 297 303 67 5'7" 159 166 172 178 185 191 198 204 211 217 223 230 236 242 249 255 261 268 274 280 287 293 299 306 312 68 5'8" 164 171 177 184 190 197 203 210 216 223 230 236 243 249 256 262 269 276 282 289 295 302 308 315 322 69 5'9" 169 176 182 189 196 203 209 216 223 230 236 243 250 257 263 270 277 284 291 297 304 311 318 324 324 331 70 5'10“ 174 181 181 188 195 202 202 209 216 222 222 229 229 229 229 236 243 257 257 257 257 264 264 278 278 278 278 285 292 2992 29992 29992 299 320 320 320 320 327 327 327 327 334 341 71 71 71 71 71 5'1 171 5'11 179 222221 265 272 279 286 293 301 308 315 322 329 338 343 343 351 72 6 265 272 280 288 295 302 310 318 325 333 340 348 348 355 363 371

1969 年 10 月 - GovInfo
add ________________ 补充,附录,补编。amdt.,amdts _______ 修正案,修正案。app ________________ 附录,附录。bk„ bks ____________ 书,书籍。chap _______________ 章,章节。Cong _______________ 国会。Dept _______________ 部门。doc ________________ 文件。facsim _____________ 传真,传真件。fy _________________ 财政年度。G.H.A ______________ 格林威治时角。H __________________ 众议院。H. Con.Res ________ 众议院联合决议。H. doc _____________ 众议院文件。H. ex.doc __________ 众议院执行文件。H. J. Res ___________ 众议院联合决议。H.R _______________ 众议院,众议院法案。H. Res _____________ 众议院决议。jj _ r p _______________ 众议院报告。n _ ____________ 插图,插图。i n _________________ 英寸,英寸,纬度 _________________ 纬度,经度 _________________ 经度。_ __________________ 英里。

主题:笔记本电脑支架和其他 10 件物品 规格:附有报价单...
5. 规格书发行地点、合同条款等的记载地点、咨询处及提交地点 防卫省情报本部网站(https://www.mod.go.jp/dih/service.html) 〒162-8806 东京都新宿区市谷本村町 5-1 防卫省情报本部总务部会计课(联系人:大西先生) 电话:03-3268-3111(内线 31752) 直拨传真:03-5225-9641
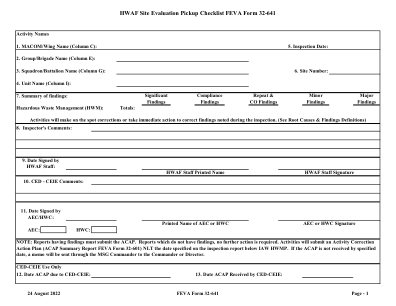
HWAF 场地评估取件清单 FEVA 表格 32-641
注意:有调查结果的报告必须提交 ACAP。没有调查结果的报告无需采取进一步行动。活动将提交活动纠正行动计划(ACAP 摘要报告 FEVA 表格 32-601)NLT IAW HWMP 下方检查报告中指定的日期。如果未在指定日期之前收到 ACAP,将通过 MSG 指挥官向指挥官或主任发送备忘录。

圆柱形件数控车削加工同轴度误差分析及优化
摘要 在工业应用中,具有精确几何公差的高精度旋转轴通常以微米级的间隙安装在齿轮和壳体之间。在大多数此类应用中,动态循环载荷是不可避免的,这会对关键部件的疲劳寿命产生不利影响。在加工过程中确保严格的尺寸公差和同轴度是非常必要的,因为它会影响许多应用中的旋转特性。因此,同轴度误差的控制在旋转轴和高精度机床中起着至关重要的作用。然而,使用高精度加工会大大增加制造成本。因此,一种能够潜在地降低同轴度误差的经济高效的加工工艺具有很高的工业重要性。本研究试图通过优化参数(切削速度、进给速度、切削深度和切削刀尖半径)来实现圆柱形加工零件的最小同轴度误差。计划进行以下实验:中心复合设计矩阵和统计分析应用响应面法确定了机器参数对高强度 Al 7075 合金同轴度误差的影响。进给速度和切削深度因素对同轴度误差有显著影响。所有加工参数对同轴度误差均表现出非线性影响,这定义了强相互作用因素的影响。通过确定一组加工参数,即应用 Big-Bang 和 Big Crunch 和 Rao(Rao-1、Rao-2 和 Rao-3)算法,利用推导出的经验方程来最小化同轴度误差。Rao 算法在计算工作量和求解精度方面均优于 Big-Bang 和 Big Crunch 算法。通过实验验证了 Rao 算法的结果,同轴度误差降低了 1.013 µm,与 CCD 实验相比提高了 72.6%。