XiaoMi-AI文件搜索系统
World File Search System伸出手
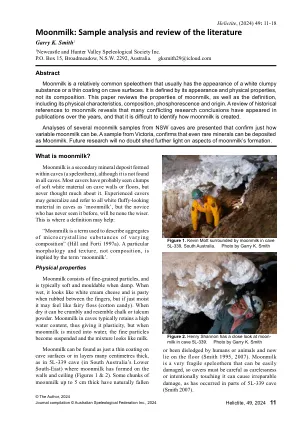
Moonmilk:样本分析和文献审查
Moonmilk的磷光特性可以在洞穴中使用肉眼观察到。诀窍是关闭所有灯光,用手遮住您的眼睛,而电子闪光灯则靠近并指向月亮米尔克(Moonmilk)。在黑暗中确保不要在黑暗中触摸月球泥。发射电子闪光后,立即伸出手,看着月亮。在大多数情况下,它会像在5L-339 Cave 5L-339中一样,在某些情况下发光几秒钟,在某些情况下,在某些情况下会发光(Smith 1995),以及在NSW的Belfry Cave(TR-2)(Smith 1996)。月亮泥的原子电子的发光,光线闪光的能量增加了能量,使它们转移到了更高的轨道上,然后在它们恢复到核周围的正常轨道时发出光。

新时代:新冠疫情迫使律师资格和律师资格考试发生改变
我一定很怀念这些学生的新 Zoom“教室”——狭小的空间里有窗帘隔断,狗和猫带着大咀嚼玩具在 Zoom 学生画廊里漫步,爸爸在记笔记时,孩子们伸出手要爸爸拥抱。我自己的教室成了我的厨房,在课间休息时,我可以倚在电脑前,方便地喝一杯星巴克冷泡咖啡。我把我的课命名为“来自兰福德教授厨房的道德”。我们完成了任务,但我敢肯定,学生们想知道,他们付出的代价是得不到实体学校的所有有形和无形的好处。法学院的学生喜欢互动;他们仍然想争论 Pennoyer 诉 Neff 案的管辖权影响,并谈论他们无聊的职业责任教授。
达到2023计划收件人
•利用包括阿拉巴马州公共卫生和塔斯卡卢萨学校和图书馆的联盟。•在塔斯卡卢萨县的非裔美国人以及西班牙裔和拉丁裔社区工作。•提高了农民市场营养计划的认识和使用,并促进了双倍的食品雄鹿(DUFB)。目标是增加获得水果和蔬菜的机会。•评估安全且可访问的体育锻炼机会。•在学校和图书馆环境中使用建筑健康家庭计划来改善家庭的营养和体育锻炼。•计划与Capstone护理学院合作,以增加疫苗接种机会并增强提供商的合作伙伴关系。这两个小组将使用伸出手来评估所有人(Rover)移动诊所。
cucat -2024-入学局
CUCAT 2024的招股说明书(Calicut University commun录取测试)2024-25的学年已发表。It contains general information and admission rules pertaining to PG/Integrated PG with multiple entry and exit options/LLM programmes in University Teaching Departments, MSW/MCA/B.P.Ed/BPES(Integrated) programmes in University self financing Centres , MSW/ MA Journalism & Mass Communication/MSc Forensic Science/MSc Health & Yoga Therapy/M.P.Ed/BPEd programmes in Affiliated Colleges .候选人必须仔细通过招股说明书,并熟悉与录取有关的所有相关信息。还要求候选人访问招生局的网站'https://admission.uoc.ac.in//'定期以获取最新通知和公告。在介绍在线注册时,大学的目标是一个崇高的目标,即向社会社会向后的候选人以及居住在卡利库特大学管辖范围内外的偏远地区的候选人伸出手。

奇皮龙高品质1 mt MRI
本文给出了有关我们目前在Chipiron上建造的内容的背景。这绝不是对鱿鱼或MRI物理学的正式介绍。相反,这是我们全球项目的一种预告片:使MRI像常规的血液采样一样容易,因此最终,每个人都可以访问所有人,而没有图像质量的妥协。因为我们提供了有关我们的技术策略的定量细节,所以读者应该有一些关于本科级数学和物理学的基本知识,以充分利用内容,尽管所有人都应该可以访问很多部分(也许会付出一点努力)。本文撰写了三种读者:想要了解引擎盖下的东西的爱好者风投和天使投资者;工程师和医疗设备专业人士,他们有兴趣加入我们的任务;还有医生,他们可能会对壁橱大小的MRI机器进行持怀疑态度。首先,我们将简要说明什么是MRI实验,以及对鱿鱼操作的量子物理学的一些风味。然后,我们将列出20年在超低场MRI的研究中已经完成的全球景观,特别是squid检测的MRI。之后,我们将制定我们的技术策略,以提高最新技术的图像质量,以最终使临床超低场MRI成为现实。请伸出手来提出您的评论和问题!dimitri@chipiron.co

在学龄前儿童中聆听故事期间的共享阅读质量和大脑激活
最初是作为一种干预措施而开发的,以促进低社会经济地位(SES)儿童的语言发展,4对话阅读是一种反映在共享阅读过程中言语互动和参与度的构造。4通过使用特定类型的提示和响应,护理人员鼓励孩子参加由故事催化的相互对话。4,5行为证据表明,对话性阅读可能会赋予中等至大的好处,包括表达语言,7,8叙事理解,5和注意力,9个基本的新兴扫盲技能。还引用了10个社会情感益处,包括增加的亲子纽带和阅读享受。11,12个培养行为,例如指导儿童的言语和圈式坐姿,也可以提高共享的阅读质量并改善结果。13然而,尽管有高度可变,但共享的阅读质量“对话性”在低社会经济状态(SES)家庭中往往较低。7、14、15因此,诸如伸出手和读取的计划涉及低调,高危家族鼓励提供者在儿科儿童访问期间建模对话阅读。2
欺骗您的眼睛在大脑上发挥作用 - 错觉
1。将纸放在您前面的桌子上,长侧位于水平位置。将您的非写入手放在纸张中间。将手指稍微分开,但指向。应该指出您的拇指。2。用铅笔追踪您的手。请确保将铅笔上下握住,而不是倾斜。小心地围绕着手指而不是在手指上画。花点时间。3。用尺子在纸张的左侧和右边缘放置一个小点。使用标尺引导您,从页面上水平绘制直线平行线(从左边缘标记到右边缘标记),从左边缘的点到右边缘的相应点。不要在您伸出手的地方绘制直线直线。当您伸到手上,向上绘制曲线,然后向下划清曲线以满足另一侧的匹配平行线。曲线之间的空间应为相同的宽度。4。重复绘制直线和弯曲的平行线,直到填充纸。5。在指关节所在的手上画一条直线。6。每个手指上的线将从平行线上弯曲,并平行于曲线的开头。在手指之间拉直线。通过示范 - 直线,曲线进行交谈;直线,曲线;直线,曲线;直线,曲线;直线,曲线;直线。在这些水平线上保持平行的距离。

从人类脑内颅内记录中解码连续的目标指导运动
摘要。伸出手是一种轻松而复杂的行为,在日常生活中是必不可少的。因此,恢复ARM功能是四肢瘫痪者的重点。最近,已经观察到并在运动皮层之外观察到了运动的神经相关性,但是运动表示的程度和粒度尚未完全了解。在这里,我们通过将神经相关性解码为目标定向行为的12种不同的运动学来探讨与大脑运动相关的神经活动的神经含量。植入立体定向脑电图电极植入的18名参与者执行了游戏化的3D目标运动任务。我们证明,可以使用优先子空间识别(PSID)中的所有参与者中的低,中和高频信息从分布式记录中解码连续运动运动学。运动的神经相关性分布在整个大脑中,包括诸如基底神经节和岛状等较深的结构。此外,我们表明只能使用目标指导的参考框架对手位置进行解码,这表明广泛的低频活动与运动的高阶处理有关。我们的结果加强了众多大脑区域存在广泛的运动相关动力学的证据,可用于连续解码运动。结果可能会为运动皮层受损的个体,例如中风后或用于自适应闭环系统中的控制信号。
汽车道路技能测试说明可能...
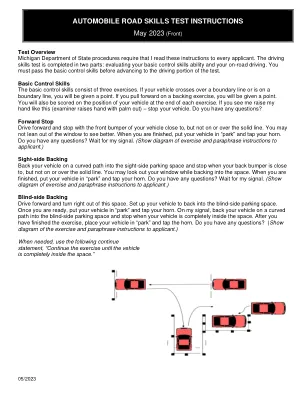
测试概述密歇根州州程序要求我向每个申请人阅读这些说明。驾驶技能测试分为两个部分:评估您的基本控制技能能力和公路驾驶。您必须通过基本控制技能,然后才能前进到测试的驾驶部分。基本控制技能基本控制技能由三个练习组成。如果您的车辆越过边界线或在边界线上,您将获得一个点。如果您向前进行衬托练习,将为您提供一个观点。您还将在每个练习结束时在车辆的位置上进行评分。如果您看到我这样的举手(考官用手掌伸出手) - 停止车辆。您有任何疑问吗?向前驱动前向前驱动,并在车辆的前保险杠上停止,但在实线上或距离上没有。您可能不会倾斜窗户看得更好。完成后,将车辆放在“公园”中,然后敲打号角。您有任何疑问吗?等待我的信号。(向申请人进行练习和解释指令的图表。)视线侧向弯曲的路径回到视线停车位,然后在后保险杠靠近(但不在坚固的线上)时停止。您可以在返回空间时向外看窗口。完成后,将车辆放在“公园”中,然后敲打号角。您有任何疑问吗?等待我的信号。盲侧背倾向向前驱动,然后向右转出这个空间。(向申请人进行练习和解释指令的图表。)设置您的车辆以返回盲侧停车位。准备就绪后,将车辆放入“公园”中,然后敲打喇叭。在我的信号上,将车辆靠在弯曲的路径上,进入盲侧停车位,并在车辆完全在空间内时停止。完成练习后,将车辆放在“公园”中,然后点击喇叭。您有任何疑问吗?(练习图和向申请人的解释说明的图表。)在需要时,请使用以下继续陈述:“继续练习,直到车辆完全在空间内为止。”

spirobs:对数螺旋形机器人,用于跨音阶的多功能抓握Zhanchi Wang,1 Nikolaos M. Freris,1,3, *和XI Wei 2,** 1 School
spirobs:对数螺旋形机器人,用于遍及尺度的多功能抓握Zhanchi Wang,1 Nikolaos M. Freris,1,3, *和XI Wei 2,** 1计算机科学技术学院,中国科学技术大学,中国,Hefei,Anhui,Anhui,Prc,Prc,230026。2中国科学技术大学化学与材料科学学院,Hefei,Anhui,Prc,230026 3 Lead Contact *通信:nfr@ustc.edu.cn。 **通信:wxi@ustc.edu.cn。 总结实现具有生物学上可比灵活性和多功能性的软操作器通常需要仔细选择材料和驱动以及其结构,感知和控制的细心设计。 在这里,我们报告了一类新的软机器人(螺纹),该机器人在形态上复制了在自然附属物中观察到的对数螺旋模式(例如,章鱼臂,大象躯干等)。 这允许在不同尺度和快速廉价的制造过程中建立共同的设计原理。 我们进一步提出了一个受章鱼启发的抓斗策略,可以自动适应目标对象的大小和形状。 我们说明了螺旋罗的敏捷性,以及抓紧大小的物体的能力,其大小多于两个以上的数量级,并且自重的260倍。 我们通过另外三种变体演示可伸缩性:微型抓手(MM),一个长时间的操纵器和一系列可以纠结各种物体的螺旋体。 这些附件能够具有显着的运动复杂性,并提供各种重要功能,例如猎物捕获,运动,操纵和防御。2中国科学技术大学化学与材料科学学院,Hefei,Anhui,Prc,230026 3 Lead Contact *通信:nfr@ustc.edu.cn。**通信:wxi@ustc.edu.cn。总结实现具有生物学上可比灵活性和多功能性的软操作器通常需要仔细选择材料和驱动以及其结构,感知和控制的细心设计。在这里,我们报告了一类新的软机器人(螺纹),该机器人在形态上复制了在自然附属物中观察到的对数螺旋模式(例如,章鱼臂,大象躯干等)。这允许在不同尺度和快速廉价的制造过程中建立共同的设计原理。我们进一步提出了一个受章鱼启发的抓斗策略,可以自动适应目标对象的大小和形状。我们说明了螺旋罗的敏捷性,以及抓紧大小的物体的能力,其大小多于两个以上的数量级,并且自重的260倍。我们通过另外三种变体演示可伸缩性:微型抓手(MM),一个长时间的操纵器和一系列可以纠结各种物体的螺旋体。这些附件能够具有显着的运动复杂性,并提供各种重要功能,例如猎物捕获,运动,操纵和防御。关键字柔软的机器人,对数螺旋,多尺度设计,软机器人握把介绍某些动物具有细长,灵活的附属物,范围从海马长度的几厘米和Chameleons的前尾尾巴1,2到超过一米的章鱼臂和大量的off臂和大头臂和大头脑trunks trunk trunks trunks 3,4。通过利用软材料或合规机制5-7,这是设计和构建柔软连续操作器的灵感来源。尽管机器人已经成功地重现了此类机器人系统中的柔性变形,并且在处理脆弱或不规则形状的物体8,安全的人类机器人互动任务9-11,医疗应用12,13等方面表现出了巨大潜力,但生物学示例在脱氧和敏捷性方面仍然超过了特大工程。例如,大象树干可以包裹直径为3厘米的胡萝卜,而它也可以抓住和堆叠300千克的树桩,直径超过直径14。章鱼手臂可以伸出手,并在次秒时间尺度上捕获鱼。