XiaoMi-AI文件搜索系统
World File Search System伸缩

50吨伸缩式轨道起重机,带电池技术
此目录描述了机器模型,单个型号的设备范围以及由Sennebogen Maschinenfabrik GmbH提供的机器的配置选项(标准设备和可选设备)。机器插图可能包含可选的和补充设备。实际设备可能会因交付机器提供的国家而异,尤其是在标准设备和可选设备方面。所有使用的产品名称都可以是Sennebogen Maschinenfabrik GmbH或其他供应公司的商标,第三方用于自己的目的的任何用途都可能侵犯所有者的权利。

引用:Hahm, Katie S. 和 H. Harry Asada。“设计一种具有新型可伸缩臂的故障安全可穿戴机器人,以便在地面工作期间符合人体工程学。” IEEE 智能机器人与系统国际会议,2019 年 11 月,中国澳门,电气电子工程师学会,2020 年 1 月。© 2019 IEEE
摘要 — 飞机制造、建筑和农业生产通常需要工人长时间保持不舒服的姿势,例如弯腰和跪下。我们介绍了一款名为 MantisBot Alpha 的可穿戴机器人,它由两个可扩展的机械臂组成,可以将工人支撑在靠近地面的位置,允许他们执行双手任务,并协助他们站立和跪下。这种新设计的关键部件是一种新颖的连杆机构,可以调整工人与地面的距离和躯干倾斜度。机构连杆参数经过优化,以便 a) 其扩展率足够高,为 1:2.43,可以将人体从地面推开并在不使用时完全收缩剪刀臂,以及 b) 它允许工人在较大的空间内伸展,同时 c) 它足够轻,便于穿戴。连杆机构还避免了标准剪刀机构中的奇异性问题。执行器设计提供了一个故障安全系统。已经制作了一个原型来证明该系统的可行性。关键词:人体增强、机器人额外肢体、外骨骼、机制设计、工业机器人

可伸缩的微骨系统,用于紫外线,可见和红外光谱
多对象光谱(MOS)是宇宙起源(COR)计划的技术发展优先级。在基于地面的MOS应用(例如,机器人配置的纤维和打孔板)中流行的孔径控制方法是刚性的,对于太空飞行而言是不实用的。微糖阵列(MSA)技术解决了此问题。MSA充当适应性的缝隙面膜。可以对数组进行编程,以提供与天空中稀疏分布的源相对应的任何缝隙。也可以对其进行编程以在扩展源上提供形状的缝隙。这种NGMSA SAT的开发重点介绍了当前宇宙起源计划优先事项的技术进步以及IR/光学/UV(IROUV)战略任务,该战略使命是十分纪念日调查:2020年代(PDAA)的天文学和天文学发现途径和天文学发现的途径。该项目的主要目的是从技术准备水平(TRL)3至5中以较大的格式(736×384,282.6k总像素)提高静电致动MSA,以支持PDAA-RECECMONTED IROUV战略任务。

使用2D聚焦光栅耦合器进行可伸缩离子量子计算的集成梁转向
使用2D聚焦光栅耦合器进行集成梁转向,用于可伸缩的离子量子计算Mizuki Shirao 1,Daniel Klawson 1,Sara Mouradian 2和Ming C. Wu 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 98195,美国电子邮件:shirao.mizuki@db.mitsubishielectric.co.jp * *作者当前的隶属关系是Mitsubishi Electric Corporation信息技术研发中心。摘要:提出了可扩展的梁转向装置,以控制离子陷阱量子计算机。波导阵列和二维聚焦耦合器的组合用于在自由空间中在729 nm波长下生成8×n光束斑点。关键字:量子计算,离子陷阱,集成的光子学

可伸缩2D纳米电子的结晶绝缘子-IUE
在半个多世纪的时间里,微电子学是由摩尔定律驱动的,摩尔的定律预测每18个月的整合密度将增加一倍,从而指数增长,这对于经济和绩效原因非常有益。根据IRDS [1]的规模,尽管摩尔法律已经结束,但在未来十年中,尽管摩尔的法律已经结束。然而,必须克服许多挑战,其中许多与材料缩放达到原子维度的事实有关,尤其是在垂直区域中。例如,硅的迁移率开始恶化在5 nm以下[2],这对于其他3D材料可以预期。因此,IRDS将分层的2D半导体列为2028年以后超级FET和内存设备的有前途的选择。符合这些要求,有几个组报告了石墨烯[3],硅[4],黑磷[5]和过渡金属二北卡尔科氏菌[6,7]表现出极好的晶体管特征。研究工作主要集中在寻找具有最高迁移率和体面的带镜头的最佳渠道材料上。此外,已经进行了MOS 2 FET的电路集成尝试[8]。然而,2D FET还需要合适的绝缘体来将控制门与通道分开,该通道应该是可扩展的,并且理想地与2D半导体一起搭配,就像SIO 2一样,与Sio 2一起使用。缺乏这些绝缘子使得完全利用2D电子设备的预先定价性能潜力是复杂的,尽管

大脑神经元网络的仿真可伸缩性得益于时间异步
处理。t这里有越来越庞大的研究项目,其1个目标是模拟大脑区域甚至完整的大脑2,以更好地了解其工作方式。让我们引用3个立场:欧洲的人脑项目(1),大脑4通过疾病研究的综合神经技术映射5(大脑/思想)在日本或大脑倡议(3)中,在6个联合国家中。几种方法是可行的。有7种生化方法(4),它注定了与大脑一样复杂的系统8。已经研究了一种更具生物物理的方法,例如,请参见(5),其中已成功模拟了皮质桶10,但仅限于10 5 11个神经元。然而,人脑含有约10 11个neu-12 rons,而像marmosets(2)这样的小猴子已经具有13 6×10 8神经元(6),而更大的猴子(如猕猴)具有14 6×10 9神经元(6)。15为了模拟如此庞大的网络,减少模型可以制作16个。特别是,神经元没有更多的物理形状,并且仅由具有18个特定电压的网络中的一个点表示。Hodgkin-Huxley方程(7),可以重现物理形状,代表了离子通道的动态,21,但这些耦合方程的复杂性形成了22个混乱的系统(8),使系统非常前端,使该系统非常前端,以模拟23个巨大的网络23。如果忽略了离子通道动态,则24个最简单的电压模型是集成与火的模型(9)。25使用此类模型,超级计算机26可以模拟人尺度的小脑网络,该网络达到约27 68×10 9神经元(10)。28然而,还有另一种观点,这可能使29我们可以使用简化的模型模拟此类大型网络。30的确,人们可以使用更多随机模型来重现31神经元的基本动力学:它们的插图模式。32不仅连接图的随机化,而且33图表上的动力学使模型更接近手头的34个数据,并在一定程度上解释其可变性。35随机的引入不是新的,并且在包括Hodgkin-Huxley(11)和泄漏37

JSP使用Intel Xeon可伸缩处理器促进高科技制造模拟
CAE是JSP业务成功的重要组成部分。在密歇根州麦迪逊高地的JSP北美总部的一支小型团队,使用ANSYS LS-DYNA软件进行了所有公司的CAE工作,以进行各种静态和动态分析。这些CAE研究用于开发最终产品以及用于制造产品的工具(或模具)的优化。作为其客户支持承诺的一部分,该集团还为每个客户提供了CAE材料模型。“客户可以将这种模型纳入自己的设计和工程工作中,” JSP的首席产品开发工程师Nurul Huda说。“例如,汽车客户可以预测其保险杠设计将如何以各种速度处理碰撞的影响。”

伸缩臂 - 65-J
高度 工作高度* 平台高度 行驶高度 最大伸展 转盘摆动 副臂运动范围 平台旋转 平台尺寸和容量 总起重能力 人员容量 平台宽度 平台深度 平台入口尺寸 收藏长度(整体) 宽度 整体高度 尾摆 重量**(大约) 工作条件 行驶 爬坡能力 离地间隙 突破角 车轴振动 轮胎 功率 动力源 燃油容量 液压油容量 运动 转弯半径(内部) 行驶速度 动臂提升速度 动臂伸展速度 副臂提升速度
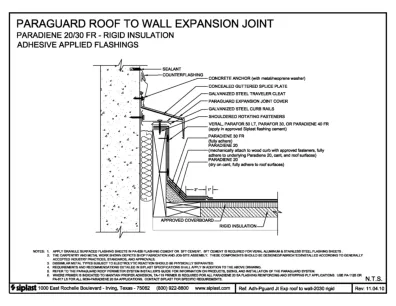
PARAGUARD 屋顶至墙壁伸缩缝
屏幕工作电压为 110·120V,60 Hz,电流为 1.1 amp。接线盒位于屏幕左端底部检修面板正上方。打开检修窗格门即可接触到接线盒盖。(请参阅下方底部检修窗格门打开和关闭说明)。拧下将接线盒固定到接线盒上的两 (2) 个六角头螺钉,露出红色、黑色和白色接线片导线以及绿色接地线(见第 3 页的接线图)。如果指定并工厂安装可选低压控制或视频接口控制,请参阅第 4 页的接线图。屏幕出厂时内部接线齐全,控制开关已完全装箱。安装人员应提供将屏幕连接到开关以及将开关连接到电源的电线。连接应按照
PARAGUARD 屋顶至墙壁伸缩缝
注意事项:1.使用 PA-828 防水水泥或 SFT 水泥涂抹颗粒表面防水板。各种铝和不锈钢防水板均需使用 SFT 水泥。2.所示的木工和金属加工描绘了车间制造和工地组装。这些组件应根据普遍接受的行业惯例、标准和批准进行设计、制造和安装。3.受电解反应影响的不同金属类型应进行物理分离。4.除上述图纸外,还应适用 SIPLAST 规格中详述的要求和建议。5.有关 PARAGUARO 系统的产品、尺寸和安装的信息,请参阅 PARAGUARO 屋顶周边系统安装指南。6.如果需要使用底漆来保持适当的附着力,则所有 PARADIENE 20 SA 防水加固和剥离层应用都需要使用 TA-119 底漆。使用 PA-1125 或