XiaoMi-AI文件搜索系统
World File Search System伺服
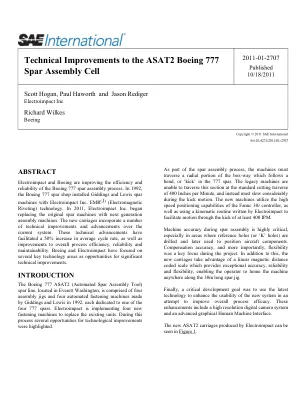
对 ASAT2 波音 777 Spar 的技术改进...
每个滑架通过弯道的运动由一对称为“Beta”轴的线性伺服调整轴控制。这些伺服轴能够在机器穿过弯道时移动机器的角。通过踢腿的运动基本上有三种模式。首先,机器进入踢腿,但工具点仍然位于翼梁的直线部分。在这里,单个 Beta 轴移动以保持机器笔直。当工具点进入踢腿时,会发生第二种模式。现在两个 Beta 轴都移动,使工具点旋转 740 毫米长、8.3 度的径向路径。第三种模式发生在工具点完成其沿翼梁弯曲部分的路径,但机器的滞后角仍然在踢腿中时。在此模式下,一个 Beta 轴移动以保持滑架笔直,直到其完全移出踢腿。图 5 演示了 Beta 轴如何从直线部分的标称位置移动

太阳能,蓝牙控制的种子计量机构的设计和开发
抽象是一种太阳能驱动的,蓝牙控制的种子计量机制,以使机器可持续且易于使用。使用蓝牙设备(如智能手机)降低了机器的成本,并具有很高的产量。它取代了燃料动力的种子计量机制,该机制有很多环境问题和人工成本。在开发的机器中,该机器由存储在电池中的太阳能提供动力。同时,机器的电动机正在使用此电源旋转,并且指示由智能手机等蓝牙设备控制。对于机器的行驶,我们使用了两个直流电动机和方向控制。前轮连接到轴承,而后轮运动高或旋转高的地方,前轮旋转该侧。对于计量机构,我们使用了金属齿轮伺服电动机360,该伺服电动机360使用蓝牙模块由Arduino Uno控制。鹰嘴豆使用该机器进行计量,并给出83%的现场效率,0.48和0.40 HAC/HR理论和实际场容量。关键字:太阳能,蓝牙模块,现场效率arduino uno


Harita Trivedi-工程企业家精神
人类核对机界面(HCMI) - 生物学的设计挑战 - 4个团队•开发了一个集成EMG信号的生物新学系统,用于实时控制蟑螂腿和伺服电机•MATLAB中的实施信号处理和校准;使用CAD设计的机械组件•实现了具有重大统计验证的精确控制(P = 0.0461)并优化的伺服响应

标准产品-NIDEC电动机
Unimotor HD是一种高动态无刷电子通勤的AC伺服电动机范围,旨在在需要快速加速和减速的脉冲功能应用中使用。电动机以060至142的框架大小可用。Unimotor HD由于其广泛的功能范围,适用于广泛的自动化应用。请使用下面的信息为Unimotor HD 220V和400V创建订单代码。

Arkadeep Narayan Chaudhury
移动摄像机:开发了一个共处的视觉,深度和触摸传感器以及一组算法,以视觉上的伺服机器人到工作区目标,并通过视觉和触摸来定位对象。ICRA&RA-L'22移动灯:设计和实施了一个机器人工作区量表光度计算机设置,用于对象不可知,表面纹理,表面方向和表面变形感知。WACV'24
使用IoT
摘要:在这项研究中,我们提出了一个基于超声传感器技术的实时对象定位的雷达检测系统。该系统结合了超声波传感器,伺服电动机和Arduino微控制器,以发送超声波,检测其回声并以高精度计算距离。此信息进行处理以生成周围环境的空间图,从而实时精确的对象检测和本地化。该系统通过利用伺服电动机旋转超声传感器,在各个角度上进行距离读数。数据已处理和呈现,从而实时可视化周围环境中发现的对象。此方法可保证具有简单性和可负担性的高精度。系统对各种环境条件的灵活性使其成为各种应用程序,例如机器人技术,安全系统,监视,障碍物检测和工业自动化的理想解决方案。该系统的主要好处之一是它的成本效益和易于建筑,使其负担得起业余爱好者,研究人员和行业专家。模块化设计还可以保证灵活性,从而可以为特定应用程序自定义它或将其与复杂的系统集成在一起。我们的研究强调了对象检测系统中超声波传感器技术的潜力,为自动化,导航和安全系统的新应用打开了大门。

BVR 飞行地面控制伺服系统 - ïmaj Teknik Elektrik
• 设计寿命超过 2000 万次 • 低反向驱动扭矩:5 英寸盎司或更低 • 优化的分离扭矩,可实现平稳启动 • 低机械间隙(10 弧分) • 高性能伺服:可实现 20 Hz 的频率响应 • MTBF > 40,000 飞行小时 • 使用寿命设计为 20 年内 > 80,000 飞行小时 • 执行器和控制器设计符合安全要求 • 故障率低于每飞行小时 1 x 10 -9

2018-scitech-final-program.pdf - AIAA
气动弹性包括对飞机、运载火箭或桥梁等配置的结构动力学和非定常空气动力学之间相互作用的建模和理解。就其本质而言,气动弹性是一个多学科领域,因此可以包括其他学科,例如控制(气动伺服弹性)和热效应(气动热弹性)。在过去的几年中,气动弹性学领域已从其传统的线性频域方法转变为更现代的非线性基于计算的方法。