XiaoMi-AI文件搜索系统
World File Search System位加扰
Jacobio Pharmaceuticals Group Co。,Ltd。 加科思...
1L NSCLC(与JAB-3312,Jacobio的SHP2抑制剂结合使用) - Glecirasib的I/IIA期试验与本地晚期或携带具有KRAS G12C突变的局部晚期或转移性晚期实体瘤中的JAB-3312结合使用。探索了具有不同剂量水平和频率的七个剂量方案。 2023年10月在西班牙马德里举行的2023年欧洲医学肿瘤学学会(ESMO)大会上有144例患者的新兴安全性和效力数据。探索了具有不同剂量水平和频率的七个剂量方案。2023年10月在西班牙马德里举行的2023年欧洲医学肿瘤学学会(ESMO)大会上有144例患者的新兴安全性和效力数据。截至本公告之日,携带KRAS G12C突变的局部晚期或转移性实体瘤患者约有200例接受了Glecirasib和Jab-3312的组合治疗。在所有患者接受联合疗法中,约有100名患者是1L NSCLC患者。长期安全和效力数据已提交给2024年美国临床肿瘤学会(ASCO)年度会议。

利用中性原子阵列进行确定性快速加扰
快速扰乱器是动态量子系统,可在随系统规模 N 呈对数增长的时间尺度上产生多体纠缠。我们提出并研究了一类确定性的快速扰乱量子电路,可在近期实验中用中性原子阵列实现。我们表明,三种实验工具——最近邻里德堡相互作用、全局单量子比特旋转和由辅助镊子阵列促进的换位操作——足以生成非局部相互作用图,这些图仅使用 O(log N)个并行最近邻门应用即可扰乱量子信息。这些工具能够以高度可控和可编程的方式直接通过实验访问快速扰乱动力学,并可利用它们来产生具有各种应用的高度纠缠态。

激光处理技术的空间应用
当人类在月球勘探和火星迁移等行星上的活动时,有必要建立一个基地,包括出发和着陆运输飞机和运输路线。从地球运输物资的成本高和运输能力有限,因此有必要在当地获得和制造大量的建筑材料。作为解决方案,我们正在进行研究,重点是通过用激光射击和融化地球的地面土壤的层压和层压方法。基于激光的技术可以应用于目前在实际使用中的3D打印机技术,将来,预计太阳能激光器将在太空中使用。
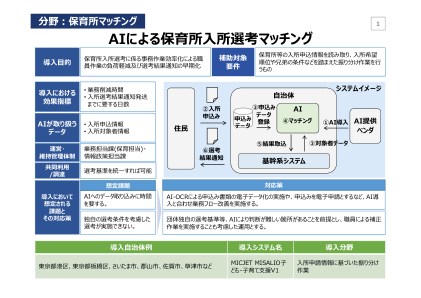
使用人工智能进行日托入学选择匹配
• 开展适当的公关活动,增加用户数量。还建议考虑各种使用方法,例如将其应用于道路以外的区域并将其用作居民参与的手段。 • 由于岗位增加可能会导致需要处理的案件数量增加,我们将考虑建立不会过度增加负担的制度,例如明确机构内道路修复响应的优先顺序,并先处理优先级较高的案件。
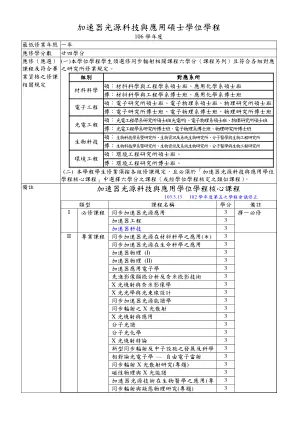
加速器光源科技与应用硕士学位学程
硕士课程在生物学和系统生物学研究所,生物科学与技术系,生物学和系统生物学研究所生物学和系统生物学研究所,生物学科学与技术学院,分子医学与技术研究所,分子医学研究所硕士课程在生物学和系统生物学研究所,生物科学与技术系,生物学和系统生物学研究所生物学和系统生物学研究所,生物学科学与技术学院,分子医学与技术研究所,分子医学研究所
VKL060 数据手册
静态显示存储器( RAM )结构为 15×4 位,存储所显示的数据。显示 RAM 的内 容直接映射成 LCD 驱动器的显示内容。通过 I2C 命令存取显示 RAM 中数据,每 读写 4bit 显示数据地址自动加 1
民航工程学(荣誉)工学士学位 - PolyU
5.4 学分转移 19 5.5 零科目注册/休学 20 5.6 一般评估规定 20 5.7 评估原则 21 5.8 评估方法 21 5.9 升学/留校察看/取消注册 22 5.10 重修科目 23 5.11 对评估结果提出上诉/对考试委员会的取消注册决定 23 5.12 特殊情况 24 5.13 评分 25 5.14 不同类型的 GPA 26 5.15 大学毕业要求 27 5.16 奖励分类指南 33 5.17 奖励分类 34 5.18 在学生记录中记录纪律处分 35 5.19 毕业 35 6. 科目大纲 36最终课程文件适用于 2016/17 学年入学学生。课程主办方可随时决定对其进行审查和更改。学生将在适当的时候被告知更改。ii


智能采煤机器人关键技术
摘 要: 采煤机是综采工作面的核心装备,研发智能采煤机器人是实现综采工作面智能化的关键。 综合分析当前采煤机机器人化研究进程中的传感检测、位姿控制、速度控制、截割轨迹规划与跟 踪控制等技术的研究现状,提出研发智能采煤机器人必须破解的 “ 智能感知、位姿控制、速度控制、 截割轨迹规划与跟踪控制、位 − 姿 − 速协同控制 ” 五大关键技术,并给出解决方案。针对智能感知 问题,提出了构建智能感知系统思路,给出了智能采煤机器人智能感知系统的架构,实现对运行 状态、位姿、环境等全面感知,为智能采煤机器人安全、可靠运行提供保障;针对位姿控制问题, 提出了智能 PID 位姿控制思路,给出了改进遗传算法的 PID 位姿控制方法,实现了智能采煤机器 人位姿精准控制;针对速度控制问题,提出了融合 “ 力 − 电 ” 异构数据的截割载荷测量思路,给出 了基于神经网络算法的截割载荷测量方法,实现了截割载荷的精准测量;提出牵引与截割速度自 适应控制思路,给出了人工智能算法牵引与截割速度决策方法和滑模自抗扰控制的牵引与截割速 度控制方法,实现了智能采煤机器人速度精准自适应控制;针对截割轨迹规划与跟踪控制问题, 提出了截割轨迹精准规划思路,给出了融合地质数据和历史截割数据的截割轨迹规划模型,实现 了截割轨迹的精准规划;提出了截割轨迹精准跟踪控制思路,给出了智能插补算法的截割轨迹跟 踪控制方法,实现了智能采煤机器人截割轨迹高精度规划与精准跟踪控制;针对 “ 位 − 姿 − 速 ” 协同 控制问题,提出了 “ 位 − 姿 − 速 ” 协同控制参数智能优化思路,给出了基于多系统互约束的改进粒子 群 “ 位 − 姿 − 速 ” 协同控制参数优化方法,实现了智能采煤机器人智能高效作业。深入研究五大关键 技术破解思路,有利于加快推动研发高性能、高效率、高可靠的智能采煤机器人。

IAES 模板指南
对于医疗/诊断数据或图像的普适计算而言,数据安全至关重要。同时还必须考虑保护患者的隐私。最近,脱氧核糖核酸 (DNA) 序列和 CS 被联合用于构建有效的数据屏蔽模型。然而,最先进的方法对裁剪攻击 (CA) 和噪声的鲁棒性不强。因为在现有模型中,每个像素的大多数数字都不会改变。这项工作代表了使用混沌和基于 DNA 的加密技术进行高效数据屏蔽 (EDM) 以保护医疗数据。为了克服研究挑战,需要有效的位加扰技术。首先,这项工作代表了一种使用逻辑正弦图和利用混沌系统的 PS 进行高效位加扰。然后在它们之间进行替换以抵抗 SA、DA 和 CA。实验是在假设不同图像的标准上进行的。获得的结果表明,与现有模型相比,引入的模型非常有效。