XiaoMi-AI文件搜索系统
World File Search System信号灯

IOC REDs CAT2
第 2 步包括更深入的评估(参见 RED 严重程度/风险评估表)以及随后的分层(参见下面的 RED 分层和运动参与指南图),将运动员分为四级交通信号灯(绿色、黄色、橙色和红色)严重程度/风险分层。根据科学证据、有效性和可用性的水平,每个交通信号灯部分的标准分为主要指标和次要指标,在有科学支持的情况下,为每个指标确定阈值 3 。对于服用甲状腺和/或性激素改变药物(例如激素类避孕药)的运动员,无法准确评估月经周期、性和甲状腺激素状态指标。因此,不要对这些运动员的月经周期进行评分。

实用的艺术:智能空间实施指南
数据的战略消费者 这个群体包括市长、城市 C 级高管、城市和运营经理、安全经理以及智慧城市规划师。他们专注于收集数据的结果和影响,因此需要尽可能多的实时信息来输入决策和规划,以确定未来战略。他们需要全面了解其管辖范围内发生的事情,以便可以交叉引用数据来识别趋势和模式。例如,如果将来自交通信号灯上具有车辆分类和计数功能的边缘设备的数据与空气质量传感器数据相结合,则可以帮助识别污染热点区域。如果将其与医疗应急系统数据相关联,就可以更容易地确定交通信号灯持续时间和车辆怠速对空气质量的影响。

使用人工智能进行车辆检测
该项目的主要目的是创建一个可以监控车辆运动的系统。车辆跟踪应用在交通管理中起着至关重要的作用,例如高速公路交通监控控制和城市交通规划。车辆跟踪过程用于跟踪车辆、计数车辆、交通分析和对不同车辆进行分类,并且可以在各种环境变化下进行。因此,我们可以在交通信号灯摄像头上使用此模型来减少道路上的交通拥堵。如果我们可以在交通信号灯摄像头中集成车辆检测系统,我们就可以轻松地同时跟踪许多有用的信息,例如白天在交通路口的车辆数量、交通拥堵的时间、穿越路口的车辆类型(重型车辆、汽车等)。该系统可以帮助我们减少交通流量并将其分散到不同的街道上。
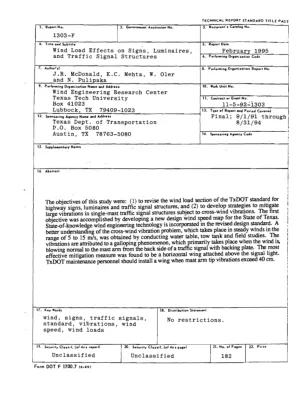
风荷载对标志、灯具和交通信号结构的影响
本研究的目的是:(1)修订 TxDOT 标准中关于公路标志、灯具和交通信号结构的风荷载部分,以及(2)制定策略以减轻受横风振动影响的单桅交通信号结构中的大振动。第一个目标是通过为德克萨斯州开发新的设计风速图来实现的。最新风工程技术被纳入修订后的设计标准中。通过进行地下水位、牵引水箱和实地研究,对发生在 5 至 15 英里范围内的稳定风中的横风振动问题有了更好的了解。振动归因于一种舞动现象,这种现象主要发生在风从带有背板的交通信号灯背面垂直吹向桅杆臂时。最有效的缓解措施是在信号灯上方安装一个水平翼。当桅杆臂尖振动超过 40 em 时,TxDOT 维护人员应安装一个翼。

东苏塞克斯公共汽车服务改进计划(BSIP)
专用的公交车道,以优先于一般流量。这将加快旅程时间,因为公共汽车将不再以交通排队的方式举行。在交界处的总线优先信号,以减少在交通信号灯处等待的时间并减少延迟。交界处更改以提供总线优先级。虚拟总线优先级措施,包括优化交通灯时机以减少公交车的等待时间。将公交车站的搬迁和改进到巴士站基础设施,并在某些地方提供新的公交避难所。为行人和骑自行车的人介绍共享的设施,包括骑自行车和步行的专用路线,远离一般交通。在某些位置进行宽道扩大,以使步行人步行更安全。通过种植,庇护所的座位区和循环停车的拟议改进。交界处的改进,包括将一些迷你行李箱转换为带有交通信号灯的信号交界处。这将使我们能够为行人和骑自行车的人提供更安全的过境设施。
模仿学习2-机器人学习
(i)学习πθ1:z 7→u(z包含一些“地面真相”数据,例如状态,交通信号灯,邻居行为)(ii)使用πθ1生成数据d = {(x i 1:t i 1:t i,u I 1:t i)} n i = 1(iii)
TMR 对运输管理咨询公司“紧急车辆优先系统调查”独立审查的回应
自 2017 年以来,EVP 服务已在 310 个 BCC 交通信号灯上运行,但是,TMR 及其项目合作伙伴(昆士兰警察局 (QPS) 和 BCC)并未将所有 EVP 系统组件从试点项目状态顺利过渡到生产状态。相反,每个合作伙伴都专注于运营自己的系统组件,没有合作伙伴正式负责监控或维护 BCC EVP STREAMS 组件。
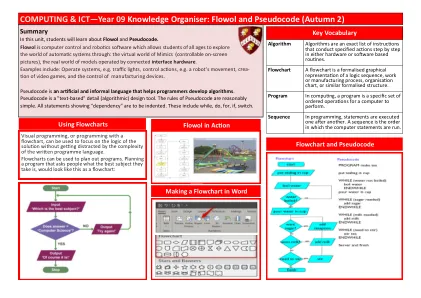
计算与ICT - 年09知识组织者
总结本单元,学生将了解Flowol和伪代码。Flowol是计算机控制和机器人技术软件,它允许各个年龄段的学生通过以下方式探索自动系统的世界:模仿的虚拟世界(可控制的屏幕上图片),这是由连接接口硬件操作的模型的真实世界。示例包括:操作系统,例如交通信号灯,控制动作,例如机器人的动作,
使用自动驾驶汽车中的人工智能检测对象检测
*交叉派对作者:bader_najep@yahoo.com摘要:本研究论文着重于对象检测,例如在Carla环境中自动驾驶系统的框架内自行车,摩托车,人员,交通信号灯,交通信号灯,贩运者招牌和车辆。目前,自动驾驶中的对象检测主要依赖于实际的自动驾驶汽车,这些车辆面临着诸如高成本和实时实施困难之类的挑战。开放源Carla系统可以进行精确且具有成本效益的实验。在本文中,使用了深度学习模型Yolov5,在培训和验证数据集中产生了良好的结果。在训练过程中总共使用了1560个不同的图像,分为1120张图像进行训练,160张用于测试的图像和320张图像进行验证。训练结果显示精度(P)为0.898,召回(R)为0.827,MAP@50 of 0.900和MAP@50-95 of 0.583。在验证结果中,精度(P)为0.891,召回(R)为0.801,MAP@50为0.880,MAP@50-95为0.542。这些结果表明该模型能够有效地检测和检索对象。关键字:(对象检测,人工智能,自动驾驶汽车,卡拉,平均平均值

Inno越南 - 日本快速赛道2024
基于AI技术,以控制phenikaa-X的自动驾驶汽车和机器人。AI解决方案应能够从一系列用于自动驾驶汽车的相机图像中构建鸟类视图(BEV)网格图。生成的网格图应包括基本物体,例如车道,人行横道,交通信号灯,车辆等。