XiaoMi-AI文件搜索系统
World File Search System倒计时

车辆事件预防和缓解安全指南概述
•纽约,纽约 - 2017年10月,一位伊斯兰州附属的演员将一辆租来的皮卡车驾驶到曼哈顿下部的自行车道上,罢工的行人和骑自行车的人。该事件杀死了八人,受伤了将近十二人。•马里兰州国家港口 - 2019年3月,一名受伊斯兰州启发的人偷走了一辆租赁面包车,计划在华盛顿特区附近的国家港口购物和娱乐场所瞄准行人货车的主人报告了它被盗,并描述了在盗窃之前跟随他的个人。警察在袭击之前拦截了车辆,并将其撞击。•田纳西州纳什维尔市 - 2020年12月,一名男子在市中心地区的通信传输设施旁边爆炸了一枚自制炸弹(RV)。RV配备了播放枪声的音响系统,并为爆炸提供了倒计时。炸弹杀死了肇事者,炸伤了其他八人,在附近的40个建筑物中损坏了40人,并破坏了五个州的通讯。•英国利物浦 - 2021年11月,一名动机不明的男子在出租车中引爆了一枚自装置的炸弹时死亡,当时他是一名乘客,因为车辆在产妇医院前驶上。出租车驾驶员受重伤。•威斯康星州沃克萨 - 2021年11月,逃离家务事件的罪犯驶过临时路障,进入了圣诞节游行路线。无视警察试图停止车辆的尝试,驾驶员继续沿着游行路线,转向行人。最终,五人死亡,62人受伤。

2025天体物理学小探险家(SMEX)宣布...
本文档为NASA提供的发射服务提供了其他信息。NASA提供的任何商业发射车(LV)将由NASA/发射服务计划(LSP)使用政府合同来采购和管理。在此AO下,建议者不得安排其他访问空间的访问。根据NASA启动服务II(NLS II)合同的规定,发射服务包括发射车辆(LV)和相关的标准服务,非标准服务(任务独特选项),所有工程和分析以及最低绩效标准。LSP还提供发布服务合同管理,发布服务的技术管理,对LV生产/测试的技术洞察力,协调和批准特定于任务的集成活动,提供任务独特的LV硬件/软件开发,提供有效载荷处理的住宿以及管理发射活动/倒计时。在适当的时间,在任务选择之后,LSP将竞争性地选择发射服务提供商,并根据客户要求为任务颁发启动服务任务订单(LSTO)。LSTO被授予承包商,该承包商根据技术能力/风险,提议价格的合理性以及过去的绩效提供了最佳的发射服务价值,以满足政府的要求。因此,作为AO建议的一部分,特定的启动车辆配置的假设将不能保证,除非有唯一的源头有牢固的技术原理,否则将选择拟议的LV配置。应在提案中清楚地确定和解释任何此类理由。所有NASA制造的发射服务均与NASA政策指令(NPD)8610.7,NASA发射服务风险缓解政策一致。NASA收购的发射服务将根据NPD 8610.23,对消耗性发射车的技术监督(ELV)发射服务和NPD 8610.24,发射服务计划(LSP)预启动准备就绪综述。可以通过AO程序库(https://explorers.larc.nasa.gov/apsmex25/smex/smex/programlibrary.html)访问这些NPD。

关于人工智能你需要知道的五件事
现在对求职者来说是艰难的时期,但你是幸运的。你刚刚得到了一次面试机会!显然,没有人会亲自会见求职者,所以你尽最大努力为虚拟面试做准备。为了做好准备,你试着研究面试官,却发现根本没有面试官!虚拟面试是上个十年的产物。你的面试完全是虚拟的,没有人际互动,只有预先录制好的问题和记录答案的提示。再做一点研究,你发现你的答案甚至不会被人审查;公司使用人工智能 (AI) 来筛选视频面试并确定谁进入下一轮。你该如何做准备?以下是你需要了解的有关 AI 视频面试的五件事。1. 什么是 AI 视频面试?技术发展迅速。多年来,各大公司一直通过 Skype、BlueJeans 以及最近的 Zoom 等平台进行虚拟面试。这是下一个合乎逻辑的步骤。人工智能将解读你对面试问题的回答,以确定你是否适合该公司。对于许多公司来说,除非人工智能确定你符合他们预设的标准,否则你的面试不会得到人工审核。 2. 它是如何工作的? 大多数基于人工智能的系统允许你在几天内的任何时间进行面试。问题是预先选择的,通常以视频形式录制。有些公司只提供问题的文本供你回答。通常,在读完每个问题后都会有一个倒计时,然后你才能录制答案。这段时间要确保你的相机对焦正确,你位于屏幕中央,并且你具有专业背景。 职业准备平台 Quinncia 的创始人 Himal Ahuja 是职业准备人工智能应用的领导者,他强调,适当的照明对于视频面试至关重要。系统必须能够看到你的脸。通常,在你的电脑后面放置光源是最好的选择。请注意,通常情况下,你的电脑屏幕会在录制过程中显示你回答问题。直视摄像头。 Ahuja 建议将一本书放在电脑下,并保持距离,这样摄像头就与眼睛齐平。许多雇主允许你在提交每个问题之前尝试回答两到三次,但这并不普遍。如果你在之前的迭代中犯了错误,多次尝试将允许你重新开始。请注意,公司可以跟踪尝试次数,并且可以
Synapsis 雷达 NX 操作手册 - Raytheon Anschütz
3.7.3.12 传输 ERBL(选项)....................................................................................................192 3.7.3.13 上下文菜单 EBL、VRM 和 ERBL...............................................................................................193 3.7.4 雷达地图.......................................................................................................................................194 3.7.4.1 编辑地图.......................................................................................................................200 3.7.4.2 选择上下文菜单编辑地图....................................................................................................201 3.7.4.3 删除 / 加载地图....................................................................................................................202 3.7.4.4 控制地图....................................................................................................................203 3.7.4.5 导入 / 导出地图....................................................................................................................204 3.7.4.6 创建新地图....................................................................................................................205 3.7.5 导航路线....................................................................................................................................206 3.7.5.1 显示航线................................................................................................................................ 206 3.7.5.2 显示交叉航迹距离限制的限制............................................................................................... 207 3.7.5.3 显示航路点标签.............................................................................................................. 207 3.7.5.4 显示航段标签................................................................................................................ 207 3.7.5.5 选择航线请求............................................................................................................. 207 3.7.6 本船...................................................................................................................................... 208 3.7.6.1 选择 AIS 信息选项卡静态............................................................................................................. 208 3.7.6.2 选择 AIS 信息选项卡导航............................................................................................................. 208 3.7.6.3 显示船尾线............................................................................................................................. 209 3.7.6.4 显示真轮廓线............................................................................................................................. 209 3.8 试用机动................................................................................................................................................ 209 3.8.1 编辑速度.......................................................................................................................................212 3.8.2 编辑试航航线..............................................................................................................................212 3.8.3 编辑延迟...................................................................................................................................212 3.8.4 编辑半径...................................................................................................................................212 3.8.5 选择右舷转弯方向.......................................................................................................................213 3.8.6 选择左舷转弯方向....................................................................................................................213 3.8.7 选择最短转弯方向....................................................................................................................213 3.8.8 开始试航....................................................................................................................................213 3.8.9 激活倒计时....................................................................................................................................213 3.9 海图雷达功能.....................................................................................................................................214 3.9.1 海图管理.....................................................................................................................................214 3.9.1.1 海图处理程序..................................................................................................................... 219 3.9.1.1.1 常规......................................................................................................................219 3.9.1.1.2 ChartHandler 接口...............................................................................................219 3.9.1.1.3 源媒体定义.........................................................................................................................221 3.9.1.1.4 图表安装.........................................................................................................................222 3.9.1.1.5 图表清单.........................................................................................................................225 3.9.1.1.6 报告.........................................................................................................................................231 3.9.1.2 手动更新.............................................................................................................................234 3.9.1.3 审查更新.............................................................................................................................237 3.9.1.4 图表 1.........................................................................................................................................239 3.9.2 申请注册许可证......................................................................................................................................................................................... 240 3.9.3 导出许可证文件......................................................................................................................240 3.9.4 海图管理刷新连接位置.......................................................................................................241 3.9.5 更新内核许可证......................................................................................................................241 3.9.6 刷新连接位置.......................................................................................................................241 3.9.7 为导入许可证文件输入自己的文件名....................................................................................241 3.9.8 海图雷达.........................................................................................................................................242 3.9.8.1 选择海图.............................................................................................................................249 3.9.8.2 优化海图底层视图....................................................................................................249 3.9.8.3 选择显示类型.............................................................................................................250

竞争弹性SSC_1.pdf
太空系统指挥指出2026年,由空军弗兰克·肯德尔(Frank Kendall)概述的SSC公共事务琳达·凯恩(Linda Kane)的关键弹性目标,定义了弹性和有效的战斗和建筑空间秩序,这是步调挑战者和最近的地缘政治事件的行动驱动的最高行动。在弹性竞赛中,太空系统命令(SSC)已建立2026年,是实现关键的近期目标的关键目标。为什么2026?SSC领导力解释说,这一时间表是使美国太空能力在任何希望破坏我们在轨道上的对手之前所必需的。2026年的截止日期还承认了不断发展的地缘政治格局,对脆弱性的不断上升的认识以及希望防止空间可被所有人使用的坏演员的意图。强调了2026年推动的紧迫性,SSC安装了倒计时,以弹性时钟在其整个位于加利福尼亚州El Segundo的主要校园中。此外,该命令还为所有人员提出了强制性威胁简报。“我们知道我们的节奏挑战者和附近的对手正在做什么,以及他们在不久的将来可能会做什么。”“每天在SSC,我们都将这些知识应用于我们做出的决定以及我们交付给战士的能力。”为了实现其2026年的目标,SSC将大力依靠其“利用我们拥有的东西,购买我们能做的东西,仅建立我们必须的运营策略”的前两个三分之二。“购买我们可以的东西”攻入已经蓬勃发展的全球商业太空行业。“利用我们拥有的东西”以新的和创新的方式利用当前的太空架构,以推动现有资产的更多甚至新的能力来支持战士和国家,以防在“今晚战斗”的情况下需要这些系统。一个备受期待的事件是即将进行战术响应空间(TACR)的演示,这是响应具有操作相关时间表中具有操作相关能力的真正威胁的关键推动者。这项名为Victus NOX(拉丁文征服当晚的拉丁文)的任务将证明在24小时的转弯时间内将新能力放在轨道上的能力。“今天有很多创新,我们可以比从头开始的传统建筑模型更快地利用,”肯尼利说。“使用商业立方体技术实现多个有效载荷只是行业伙伴关系加速创新节奏的众多示例之一。” Kniseley指出,通过购买商业服务也有巨大的机会来更快地交付。,国防部已经攻入SATCOM,作为每年20亿美元的唱片的服务。“我们还在商业太空领域的意识中取得了长足的进步,并将其纳入我们的联合运营中心,”肯尼利说。相邻行业在SSC的弹性竞赛中也发挥了关键作用。5月,SSC将举行一个反向行业日,专注于人工智能(AI)和机器学习(ML),用于太空分析。这些
参与者培训师的练习练习指南
欢迎来到2020 Mint TNT!对新培训师(TNT)的薄荷培训的主要目标是为您提供体验各种培训方法的机会,以帮助人们发展动机面试的能力。本文档描述了已开发或适应用于在线培训的25种练习练习。随着3天的发展,练习范围从基本到更复杂。所有25个将由TNT参与者领导,你们每个人都有机会训练至少四个练习。用你自己的话说说明;这些只是指南。在面对面的TNT期间,我们通常会描述每项练习,然后在现场志愿者作为培训师。对于此在线TNT,我们取而代之的是预分配了你们每个人进行特定练习。请咨询培训师列表,以了解您将领导哪些练习。在研讨会期间,我们仍将在练习之前描述每个练习;这项提前计划只会为您提供一些额外的时间来熟悉您将要训练的练习。所有练习都将在虚拟的分类室中进行,每个练习都有自己的指定教练。每个练习都有规定的小组规模,您的训练参与者的数量从2到11不等。该TNT中的参与者总数通常不经过组的数量均匀地排除,因此小组规模可能会因一个(例如,六或七个参与者)而有所不同。对于每次练习,也有一个规定的时间长度。倒计时时钟将在屏幕上可见,在分配的时间结束时,每个人都会自动将其带回整个组。如果您在突破室中需要帮助,您可以单击寻求帮助,我们的技术支持,金和Desiree将会做出回应。您也可以单击“离开突破室”,该室将使您转移到MITC的家庭基地,在那里将有比尔或Terri。技术可以将您返回到突破室。以便每个人都有机会至少在担任培训师时被观察两次,我们有一个由十个教练组成的团队,他们都是薄荷成员和经验丰富的培训师。在场时,教练就在那里只是为了观察和支持您。您应该以培训师为首;教练可以回答问题,但您负责。练习后,教练将向您发送一些反馈。如果您在一个小时左右的时间内不听到教练的消息,请向Kim或Desiree发送聊天评论(请不要给所有人),他们正在监视聊天,他们会跟进。与您训练的大多数人相比,此TNT的参与者的技能水平很高。在此TNT期间,当您是运动中的“学员”时,请放松,不要努力做出完美的MI回答。最好像受训者那样,以初学者的思想参加这些练习。按照培训师的说明,好像您还不知道该怎么办。实际上,偶尔会出现错误,以给培训师做一些事情!将假定参与者在此TNT中犯的所有错误都是有意的,作为帮助您的培训师的一种方式。不要成为“地狱学员”,请注意 - 只是将成为未来MI培训的人的现实代表。
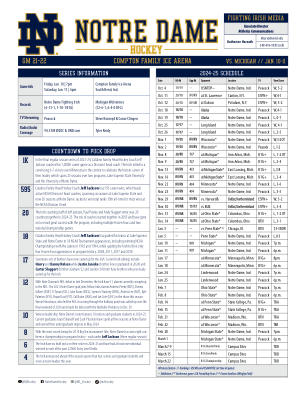
GM 21-22 康普顿家庭冰上竞技场
冰球投掷 1K 倒计时 在 2023-24 赛季的最后一场常规赛系列赛中,卡塔利诺家族冰球主教练杰夫·杰克逊执教了他作为一级联赛主教练的第 1,000 场比赛。爱尔兰队以 6-1 的压倒性优势击败明尼苏达队,以庆祝其领袖的历史性职业生涯,该职业生涯横跨两个项目 25 个赛季;苏必利尔湖州立大学和圣母大学。595 卡塔利诺家族冰球主教练杰夫·杰克逊的职业生涯获胜场次为 595 场,领先于现役 NCAA 一级联赛主教练,横跨苏必利尔湖州立大学六个赛季,现在在圣母大学执教 20 个赛季。杰克逊的获胜总数在 NCAA 一级联赛历史上排名第 10。20 爱尔兰教练组 Jeff Jackson、Paul Pooley 和 Andy Slaggert 将于 2024-25 年一起执教,进入第 20 个年头。这三位教练于 2005 年一起开始执教,并在该项目中取得了巨大的成功,包括多次冰冻四强赛和两次全国冠军赛。18 卡塔利诺家族冰球主教练 Jeff Jackson 带领苏必利尔湖州立大学和圣母大学的球队参加了 18 次 NCAA 锦标赛,包括在 1992 年和 1994 年与湖人队一起赢得 NCAA 冠军,同时带领爱尔兰队在该项目历史上仅有的四次冰冻四强赛中亮相:2008 年、2011 年、2017 年和 2018 年。17 现在已有 17 对兄弟为爱尔兰队效力。目前爱尔兰队的兄弟姐妹包括亨利和丹尼·尼尔森,而贾斯汀·贾尼克(兄弟特雷弗于 2024 年毕业)和卡特·斯拉格特(兄弟格雷厄姆 '22 和兰登 '24)都有兄弟之前曾为爱尔兰队效力。12 随着内特·克鲁曼于 12 月下旬首次亮相 NHL,爱尔兰队目前有 11 名校友在 NHL 比赛。这位 2021 年圣母大学毕业生将与其他爱尔兰校友 Andrew Peeke (BOS)、Dennis Gilbert (BUF)、TJ Tynan (COL)、Jake Evans (MTL)、Spencer Stastney (NSH)、Anders Lee (NYI)、Kyle Palmieri (NYI)、Bryan Rust (PIT)、Cal Burke (VGK) 和 Ian Cole (UHC) 一起参加本赛季的比赛。Vinnie Hinostroza 在半程得分方面领先 AHL,他在 2024 年的最后一个周末被召回,并于 12 月 30 日首次代表纳什维尔掠夺者队出战。10 资深领导:圣母大学的名单上有 10 名 2024-25 学年的大四学生和研究生。现任毕业生 Grant Silianoff 和 Zach Plucinski 在圣母大学度过了五个赛季,并于 2024 年 5 月获得本科学位。8 最近的一次是 2019 年十大联盟锦标赛冠军,圣母大学在项目历史上赢得了八次联盟冠军——每次都是在 Jeff Jackson 的带领下(三次常规赛)。6 爱尔兰队在 2024-25 赛季的名单上有六个选秀权,在过去的 22 届 NHL 入门级选秀中,每次都有至少一名球员入选。4 爱尔兰队在赛季揭幕战前宣布,今年将有四名大四学生和研究生担任球队领袖。
配置文件
新闻通讯。1998年7月和12月,第5(1,2):18 -24。2)A.A。 Juwarkar,A.B。Kulkarni,H.P。 Jambhulkar和P. Khanna。 通过综合的生物技术方法(Neeri的经验)填海垃圾。 由钢铁和矿业部组织的巨型活动1998年8月6日至8日:印度矿产工业 - 观点,pp。 297-307。 3)A。 A. Juwarkar和H.P. Jambhulkar。 通过生物学干预措施恢复粉煤灰转储。 环境监测和评估卷139,第1-3号,2008年4月,第355 -365页。 4)A.A。 Juwarkar和H. P. Jambhulkar Phytoremedemedemedeation通过综合生物技术方法破坏了垃圾场。 Bioresource Technology.Vol.99 /11,10月; 2008 pp.4732-4741。 5)Hemlata P. Jambhulkar和Asha A. Juwarkar。 评估在粉煤灰垃圾场种植的不同植物物种对重金属的生物积累。 生态毒理学和环境安全。 (2009)。 第72卷,第1122-1128页。 6)Asha Ashok Juwarkar,Lal Singh,S.K。 Singh,Hemlata P. Jambhulkar,Prashant R. Thawale和Harsha Kanfade。 自然与印度木兰矿山矿山变质的林木森林 - 印度那格浦尔的锰矿石 - 关于继任变化,开垦技术和植物多样性的案例研究。 国际采矿,开垦与环境杂志(2014年)。 第29卷,第6页。 第476-498号。 7)Juwarkar AA,Singh L,Kumar GP,Jambhulkar H P,Kanfade H&Jha A K.通过动植物动物的互动中修复的矿山的生物多样性促进。Kulkarni,H.P。Jambhulkar和P. Khanna。通过综合的生物技术方法(Neeri的经验)填海垃圾。由钢铁和矿业部组织的巨型活动1998年8月6日至8日:印度矿产工业 - 观点,pp。297-307。3)A。A. Juwarkar和H.P. Jambhulkar。 通过生物学干预措施恢复粉煤灰转储。 环境监测和评估卷139,第1-3号,2008年4月,第355 -365页。 4)A.A。 Juwarkar和H. P. Jambhulkar Phytoremedemedemedeation通过综合生物技术方法破坏了垃圾场。 Bioresource Technology.Vol.99 /11,10月; 2008 pp.4732-4741。 5)Hemlata P. Jambhulkar和Asha A. Juwarkar。 评估在粉煤灰垃圾场种植的不同植物物种对重金属的生物积累。 生态毒理学和环境安全。 (2009)。 第72卷,第1122-1128页。 6)Asha Ashok Juwarkar,Lal Singh,S.K。 Singh,Hemlata P. Jambhulkar,Prashant R. Thawale和Harsha Kanfade。 自然与印度木兰矿山矿山变质的林木森林 - 印度那格浦尔的锰矿石 - 关于继任变化,开垦技术和植物多样性的案例研究。 国际采矿,开垦与环境杂志(2014年)。 第29卷,第6页。 第476-498号。 7)Juwarkar AA,Singh L,Kumar GP,Jambhulkar H P,Kanfade H&Jha A K.通过动植物动物的互动中修复的矿山的生物多样性促进。A. Juwarkar和H.P.Jambhulkar。通过生物学干预措施恢复粉煤灰转储。环境监测和评估卷139,第1-3号,2008年4月,第355 -365页。4)A.A。 Juwarkar和H. P. Jambhulkar Phytoremedemedemedeation通过综合生物技术方法破坏了垃圾场。Bioresource Technology.Vol.99 /11,10月; 2008 pp.4732-4741。5)Hemlata P. Jambhulkar和Asha A. Juwarkar。评估在粉煤灰垃圾场种植的不同植物物种对重金属的生物积累。生态毒理学和环境安全。(2009)。第72卷,第1122-1128页。 6)Asha Ashok Juwarkar,Lal Singh,S.K。 Singh,Hemlata P. Jambhulkar,Prashant R. Thawale和Harsha Kanfade。 自然与印度木兰矿山矿山变质的林木森林 - 印度那格浦尔的锰矿石 - 关于继任变化,开垦技术和植物多样性的案例研究。 国际采矿,开垦与环境杂志(2014年)。 第29卷,第6页。 第476-498号。 7)Juwarkar AA,Singh L,Kumar GP,Jambhulkar H P,Kanfade H&Jha A K.通过动植物动物的互动中修复的矿山的生物多样性促进。第72卷,第1122-1128页。6)Asha Ashok Juwarkar,Lal Singh,S.K。Singh,Hemlata P. Jambhulkar,Prashant R. Thawale和Harsha Kanfade。自然与印度木兰矿山矿山变质的林木森林 - 印度那格浦尔的锰矿石 - 关于继任变化,开垦技术和植物多样性的案例研究。国际采矿,开垦与环境杂志(2014年)。第29卷,第6页。第476-498号。7)Juwarkar AA,Singh L,Kumar GP,Jambhulkar H P,Kanfade H&Jha A K.通过动植物动物的互动中修复的矿山的生物多样性促进。生态系统与生态学杂志。(2016)。批量6,第1期,第1-10 8号)Hemlata P. Jambhulkar,Siratun Montaha .S Shaikh和M Suresh Kumar。粉煤灰毒性,新出现的问题以及对农业剥削的可能影响;印度情景:评论化学圈(2018)。vol.213,2018年12月,第333-344页9)Hemlata P. Jambhulkar&M Suresh Kumar(2019)。通过生物技术路线的矿山破坏倒计时的生态恢复方法。环境监测和评估2019年11月,191-772 10)Hemlata P Jambhulkar。(2023)。粉煤灰改善对土壤健康的影响和不利影响;评论。印度环境管理协会杂志2023年10月,第43卷,第3期,第3页,01- 08。专利