XiaoMi-AI文件搜索系统
World File Search System倾转翼

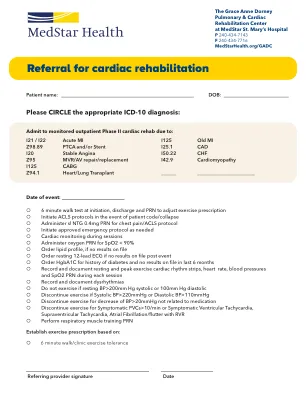
转介心脏康复
在开始时进行6分钟步行测试,调整锻炼处方在患者代码/倒塌的情况下启动ACLS方案启动ACLS协议/管理sl sl sl sl sl sl ntg ntg prn用于胸痛/ACLS协议启发批准的紧急协议,根据需要进行of ox forn for prn prn droming prn droming prn droming driming under indress if RESSINIF RERSING IF RESSINIS prn up indious prn defiend。 12-lead ECG if no results on file post event Order HgbA1C for history of diabetes and no results on file in last 6 months Record and document resting and peak exercise cardiac rhythm strips, heart rate, blood pressures and SpO2 PRN during each session Record and document dysrhythmias Do not exercise if resting BP>200mm Hg systolic or 100mm Hg diastolic Discontinue exercise if收缩BP> 220mmHg或舒张性BP> 110mmHg即停止练习,以减少BP> 20mmHg与药物无关的20mmHg有症状的PVC> 10/min> 10/min或有症状的心室心动过速,tachycardia tachycardia,tachycartarial tachycardia tachycardial/Atrial fibrnation ullullation ullullation ullullation ul ullullation ullullation usiration ullullation us ull us us us us。
大动脉的转位(TGA)
一个老谚语说“健康的心,定义健康”;这种情况与影响个人健康的心脏病的日益增长。心脏病一直在全球最大死亡率的主要主张中变得越来越普遍。然而,如今的出生问题甚至是重大的,需要对至关重要的识别,以便有效地采取未来的措施。这样的问题是,大多数孩子面临的是心脏的胚胎学发育中,主要被命名为蓝生综合症,导致婴儿的每百万个活产近400个。因此,本文与类似的思想保持一致,以确定增加(TGA)或大动脉在儿童中的问题的问题和关注。
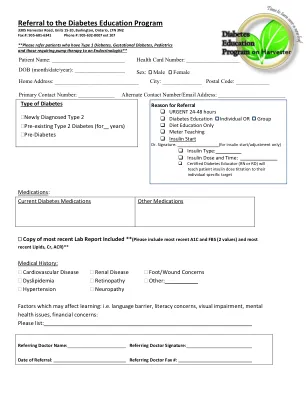
转介到糖尿病教育计划
紧急24-48小时糖尿病教育个人或小组饮食教育仅限仪表胰岛素胰岛素开始征用博士:(仅用于胰岛素的开始/调整)胰岛素类型:胰岛素剂量和时间:认证的糖尿病教育家(RN或RD)将教导患者胰岛素剂量滴定对其单个特定特定目标
中型翼身融合亚音速运输机设计
根据联邦航空管理局的研究,仅美国航空公司每年就燃烧 162 亿加仑的航空燃料,导致美国空气污染的 3% 以上,航空业贡献了全球空气污染的 1% 以上。与其他污染源相比,这些数字可能看起来微不足道,但航空业仅占世界贸易量的 0.5%,而全球能源消耗量为 2.2%。目前电池和电动机的进步并不能在不久的将来取代燃气涡轮发动机,特别是对于远程飞机而言。本文介绍了一种 BWB 飞机的概念设计,该飞机可载客 160 人,航程 9200 公里,巡航速度为 0.77 马赫数,可通过 FAR 25 认证。设计非常规配置的方法包括传统的飞机设计方法和新颖的方法。在任何航程方程中,升阻比都起着重要作用。对于 BWB 飞机来说,这个比率相当高,而且随着发动机效率的提高,每位乘客每公里的燃油消耗量可以大幅降低。与具有类似载客量和任务特征的传统飞机相比,BWB 飞机的一体式设计提供了较低的空重。

对高速旋翼空气力学的基本理解......
1.1 复合直升机的示例.......................................................................................................................................................3 1.2 倾转旋翼飞机的示例.......................................................................................................................................................3 1.3 前飞对后飞桨叶速度的影响.......................................................................................................................4 1.4 同轴反向旋转旋翼能够在前飞期间保持每个旋翼的升力不对称,每个旋翼的力矩相互抵消。通过消除后飞桨叶升力来平衡旋翼力矩的需要,可以缓解后飞桨叶失速,就像单旋翼飞行器一样(左图)[5]。................................................................ ..................................................................................................................................................................................4 1.5 兰利全尺寸风洞中的 PCA-2 转子试验装置 [11]。...9 1.6 采用悬臂转子配置的 Meyer 和 Falabella 风洞试验装置 [12]。......................................................................................................................................................................10 1.7 叶片表面压力端口的展向和弦向位置 [12]。11 1.8 零铰链偏移转子的轮毂组件,显示来自叶片的压力管连接到轮毂内的压力拾音器 [12]。 12 1.9 1965 年詹金斯在兰利全尺寸风洞中的试验装置 [13]。 14 1.10 高进速比时转子推力和 H 力系数与总距(A0)的关系,显示总距推力反转 [13]。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 1.13 在增加前进比的情况下,在盘面载荷恒定的情况下测得的有效旋翼升阻比 [16]。 . . . . . . . . . . . . . 21 1.14 升力对总距比和前进比的敏感度变化 [16]。 . . . . . 22 1.15 在 NASA 艾姆斯研究中心 40 x 80 英尺 NFAC 风洞中监测 UH-60A 空气载荷旋翼 [17]。 . . . . . . . . . . . . . . 24 1.16 压力传感器在仪表旋翼叶片上的分布 [17] 24 1.17 UH-60A 减速旋翼风洞试验中明显的集体推力反向趋势 [18]。 . ...

BB4 AF - 多旋翼无人机解决方案 - CHCNAV
BB4 A F是两大行业领军企业联合打造的高端无人机系统。其科学的设计和高度集成的生产技术来自全球领先的高效地理空间测量技术制造商CHCNAV,其全自动飞行控制系统则来自商用无人机制造的先驱DJI。

6 自由度多旋翼飞行器的建模与控制:Air-Ball by ...
我要感谢我的导师:Markus Wilde 博士、Tiauw Go 博士和 James Brenner 博士,感谢他们在我在佛罗里达理工学院的整个学术生涯中给予我的耐心、指导和支持。如果没有他们的专业知识,这篇论文就不可能完成。我要特别感谢 Wilde 博士,感谢他从大三设计到大四设计一直指导这个项目,并将其变成一个论文项目。这个项目给了我一个成长为工程师的绝佳机会。我还要感谢我的矩阵主管 Jose Nunez 博士,感谢他给一个刚毕业的工程研究生一个机会,并给了我在 NASA KSC 工作的机会。特别感谢我的 NASA 导师:Mike DuPuis 和 Michael Johansen,感谢他们的耐心以及他们在建模和控制方面的丰富知识。当然,我要向 NASA KSC 飞行技术部门的所有人表示感谢。最后,我要感谢我的朋友 James (Jimmy) Byrnes、Andrew Czap、Juliette Bido 和 Charles (Joe) Berry 在本论文的整个过程中给予的支持和投入。我很自豪地说我和他们是同一届的。

研究前飞多旋翼风洞测试...
A). ................................................................................................................................................................ 63
有翼电动垂直起降飞机的轨迹生成与跟踪控制
目前,有翼 eVTOL 无人机的控制方法主要将飞行器视为固定翼飞机,并在起飞和降落时增加垂直推力。这些方法提供了良好的远程飞行控制,但未能考虑飞行器跟踪复杂轨迹的完整动态。我们提出了一种轨迹跟踪控制器,用于有翼 eVTOL 无人机在悬停、固定翼和部分过渡飞行场景中的完整动态。我们表明,在低速到中速飞行中,可以使用各种俯仰角实现轨迹跟踪。在这些条件下,飞行器的俯仰是一个自由变量,我们使用它来最小化飞行器所需的推力,从而降低能耗。我们使用几何姿态控制器和空速相关控制分配方案,在各种空速、飞行路径角和攻角下操作飞行器。我们假设采用标准空气动力学模型,为所提出的控制方案的稳定性提供理论保证,并展示模拟结果,结果显示平均跟踪误差为 20 厘米,平均计算率为 800 Hz,与使用多旋翼控制器进行低速飞行相比,跟踪误差减少了 85%。