XiaoMi-AI文件搜索系统
World File Search System六角形
超导加速器磁铁的简介...
正常状态(H> HC 2)•HC 1 含有磁通量量子φO= H/2E的圆柱磁管的正常区域;涡旋芯具有= 2 = 2•涡流相互作用:六角形涡流晶格,以最大程度地减少SC磁铁的磁铁排斥能•在SC磁铁中:运输电流 +盾牌超级币,因此由于Vorterents colex colex coex coexisisiss coexisiss is coexisiss is coexisiss!含有磁通量量子φO= H/2E的圆柱磁管的正常区域;涡旋芯具有= 2 = 2•涡流相互作用:六角形涡流晶格,以最大程度地减少SC磁铁的磁铁排斥能•在SC磁铁中:运输电流 +盾牌超级币,因此由于Vorterents colex colex coex coexisisiss coexisiss is coexisiss is coexisiss!含有磁通量量子φO= H/2E的圆柱磁管的正常区域;涡旋芯具有= 2 = 2•涡流相互作用:六角形涡流晶格,以最大程度地减少SC磁铁的磁铁排斥能•在SC磁铁中:运输电流 +盾牌超级币,因此由于Vorterents colex colex coex coexisisiss coexisiss is coexisiss is coexisiss!
Hopg耐力电离辐射
仅由碳原子组成,这些碳原子以六角形形状排列,高度定向的热解石墨(HOPG)属于层状材料。与原子平行和堆叠层排列的原子具有结晶结构,其特征在于其高度的三维顺序(类似于此,但以二维形式组织,称为石墨烯),换句话说,

加速E ...
实现这些目标需要成功进行数字化转型,并具有企业级的敏捷性,以加速创新和可持续性。大众汽车的长期合作伙伴 Hexagon提供了必要的解决方案,以实现工艺自动化,精度和可扩展性。 在整个组中,六角形设备用于提供尺寸质量保证,包括以自动Presto解决方案的形式。 一起,Hexagon的数字现实软件和硬件使大众能够连接数字和物理世界,优化操作并在整个生产范围内嵌入质量。Hexagon提供了必要的解决方案,以实现工艺自动化,精度和可扩展性。在整个组中,六角形设备用于提供尺寸质量保证,包括以自动Presto解决方案的形式。一起,Hexagon的数字现实软件和硬件使大众能够连接数字和物理世界,优化操作并在整个生产范围内嵌入质量。
![arxiv:2502.14861v1 [cond-mat.mtrl-sci] 2025年2月20日](/simg/6\6963b17f2090d74d434fe6359e7867248b3340aa.webp)
arxiv:2502.14861v1 [cond-mat.mtrl-sci] 2025年2月20日
堆叠的二维晶格的异质结构在设计新型材料特性方面表现出了巨大的希望。作为这种系统的原型示例,六角形共享的蜂窝 - 卡加姆晶格已在各种材料平台中实验合成。在这项工作中,我们探索了蜂窝状晶格的三个旋转对称变体:六边形,三亚贡和双轴相。分别表现出二轴和双轴相分别表现出微不足道的不体和狄拉克半分条带结构,但六边形相位的六角相构成了一个高阶拓扑相,由γ点附近的频带倒置驱动。这突出了与六角形同型系统中观察到的k点的传统频带反转的关键区别。fur-hoverore,我们演示了这些阶段的不同拓扑特性如何导致由扭曲或晶格不匹配的HK Sys-sys-sys形成的Moir'E异质结构内的网络带结构。可以通过蜂窝和kagome系统之间的外在扭曲或固有的晶格不匹配来实验观察这些网络带结构。
MIL-DTL-55302/57H 带修订 1 - ASSIST-QuickSearch
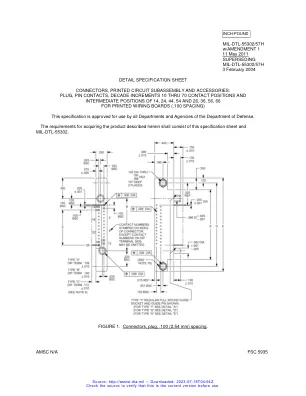
注意:1. 尺寸以英寸为单位。 2. 公制单位仅供参考。 3. 除非另有规定,公差为 ± .005 (0.13 mm)。 4. 这些连接器使用适当的硬件与 MIL-DTL-55302/62、MIL-DTL-55302/64、MIL-DTL-55302/65、MIL-DTL-55302/66 和 MIL-DTL-55302/58 中规定的连接器配接。 5. 应在连接器的侧面标记表示每行第一个和最后一个位置以及其间每四个触点位置的数字。作为上述选项之一,可在连接器的侧面标记表示每四个腔体的数字,但必须标记一号触点。 6. 端接布局在 .020 (0.51 mm) 模块化网格上。 7. 括号中为公制单位。8. 手柄形状可选。9. 可选底切最大 0.050 (1.27 毫米),位于 PCB 侧,用于清洁。10. 六角形方向的位置可选。六角形不得突破绝缘体侧面。11. 内孔导向硬件的孔深最小为 0.282 (7.16 毫米)。内螺纹硬件的全螺纹深度最小为 0.240 (6.1 毫米)。

分类算法的比较研究早期检测到糖尿病
摘要Hexapods对各种运动任务的适应性,尤其是在救援和勘探任务中,可以推动其应用。与受控环境不同,这些机器人需要驾驶不断变化的地形,在这种环境中,地面不规则影响会影响立足点位置和接触力的起源转移。这种动态相互作用导致六角形姿势变化,影响整体系统稳定性。这项研究介绍了一种姿势控制方法,该方法根据地形拓扑调整了六角形的主体定向和高度。策略使用肢体位置估算地面斜率,从而计算新的肢体轨迹以修改六脚架的角度位置。根据计算出的斜率调整六足的高度,进一步增强了主体稳定性。在雅典娜六角(Athena Hexapod)(环境适应性的全地形六角形)上实施和评估了所提出的方法。通过使用凉亭软件中的计算模拟,通过对六足动物在不规则表面上的多体模型的动态分析来评估控制可行性。环境复杂性对六足动物稳定性的影响都在坡道和不平坦的地形上进行了测试。对每种情况的独立分析都评估了控制器对滚动和俯仰角速度的影响以及高度变化。结果证明了该策略对这两种环境的适用性,从而显着增强了姿势稳定性。
富含硼的金属二吡啶的非平衡反应性...
图1:富含硼的六角形面孔的热力学的从头开始。(a)BOB 2表面的表面相图,其额外表面硼的覆盖范围与B大典型的全局优化采样的覆盖范围不同。虚线标记了与B富集相关的化学潜力。(b)在与B富集相关的化学势方面,采样表面相的大规范自由能。(c)三个表面相(B 0,B 1/9和B 1/3)结构的顶部和前视图,可以通过硼 - 富集来制备。额外的硼原子以黄色圆圈标记。原子的颜色代码:mo - 蓝色,b - 粉红色。

MAT SCI 361:晶体学和衍射
4晶格20 4.1晶格内的索引。。。。。。。。。。。。。。。。。。。。。20 4.1.1六角形棱镜。。。。。。。。。。。。。。。。。。。。。。。。。21 4.1.2表格。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。23 4.1.3方向指数。。。。。。。。。。。。。。。。。。。。。。。。。24 4.1.4区域。 。 。 。 。 。 。 。24 4.1.4区域。。。。。。。。。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>24 4.2纬度。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>25 4.2.1单元单元。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 27 4.2.2 Planne Group。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div>25 4.2.1单元单元。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>27 4.2.2 Planne Group。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div>27 4.2.2 Planne Group。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>27 4.3示例石墨烯。。。。。。。。。。。。。。。。。。。。。。。。。。30 4.3.1太空格子或勇敢的格子。。。。。。。。。。。。。。。31 4.3.2单位单元内的位置。。。。。。。。。。。。。。。。。31 4.3.3六角形闭合结构HCP。。。。。。。。。。。。31 4.3.4菱形(六角形)。。。。。。。。。。。。。。。。。。。32

各向异性约瑟夫森二极管效应在拓扑杂交中...
SDE扩展的最有希望的平台之一是基于拓扑绝缘体的二极管[1]。Ti的表面提供了强的自旋轨道耦合(SOC),这使得有可能证明具有实质性的磁电效应[2]。已经向基于Ti的Josephson连接处的磁电效应支付了特殊的注意,在那里它以异常的基态相移的形式揭示了自己[3,4]。最近,已经证明,在Ti杂种结构中,在空间分离超导性和铁磁性的结构中,也对基态进行了修改[5,6]。在这种情况下,基态对应于空间不均匀的超导顺序参数。这种超导状态通常称为螺旋状态[7]。超导螺旋状态成为实现SDE的选择之一[8]。由有限的库珀对动量描述,螺旋状态可以在反转和时间反向对称性的系统中进行实现。前者与哈密顿式的SOC术语的出现相连,而后者可以由磁场引入。在这种情况下,库珀对动量的方向取决于磁场的方向。库珀对的有限含量,锁定在磁场的方向上,导致各种系统中的非偏置下降电流。在这里,我们讨论了Ti表面状态在S/TI/S系统中使用平面内Zeeman字段中的Josephson Critistal Crister和非转流运输的六角形翘曲的后果。在基于TI的设备中,六角形翘曲的影响很重要,因为它可以显着改变某些运输特性。例如,众所周知,由于费米表面的变形,在缺陷附近的伴侣效应得到了强烈增强[9]。翘曲术语也导致自旋的各向异性