XiaoMi-AI文件搜索系统
World File Search System冯诺依
![b'我们提出了一系列量子算法,用于计算各种量子熵和距离,包括冯·诺依曼熵、量子 R\xc2\xb4enyi 熵、迹距离和 \xef\xac\x81delity。所提出的算法在低秩情况下的表现明显优于最知名的(甚至是量子的)算法,其中一些算法实现了指数级加速。特别是,对于秩为 r 的 N 维量子态,我们提出的用于计算冯·诺依曼熵、迹距离和 \xef\xac\x81delity(加性误差 \xce\xb5 内)的量子算法的时间复杂度为 \xcb\x9c O r 2 /\xce\xb5 2 、 \xcb\x9c O r 5 /\xce\xb5 6 和 \xcb\x9c O r 6 。 5 /\xce\xb5 7 . 5 1 。相比之下,已知的冯·诺依曼熵和迹距离算法需要量子时间复杂度为 \xe2\x84\xa6( N ) [AISW19,GL20,GHS21],而最著名的 \xef\xac\x81delity 算法需要 \xcb\x9c O r 21 . 5 /\xce\xb5 23 . 5 [WZC + 21]。我们的量子算法的关键思想是将块编码从先前工作中的幺正算子扩展到量子态(即密度算子)。它是通过开发几种方便的技术来操纵量子态并从中提取信息来实现的。特别是,我们基于强大的量子奇异值变换(QSVT)[GSLW19],引入了一种用于密度算子及其(非整数)正幂的特征值变换的新技术。我们的技术相对于现有方法的优势在于,不需要对密度算子进行任何限制;与之形成鲜明对比的是,以前的方法通常需要密度算子的最小非零特征值的下限。此外,我们还提供了一些独立感兴趣的技术,用于(次规范化)密度算子的迹估计、线性组合和特征值阈值投影仪,我们相信这些技术在其他量子算法中会很有用。'](/simg/4\4e9553780581bbfda8e4d6bb48115782efffb2a7.webp)
b'我们提出了一系列量子算法,用于计算各种量子熵和距离,包括冯·诺依曼熵、量子 R\xc2\xb4enyi 熵、迹距离和 \xef\xac\x81delity。所提出的算法在低秩情况下的表现明显优于最知名的(甚至是量子的)算法,其中一些算法实现了指数级加速。特别是,对于秩为 r 的 N 维量子态,我们提出的用于计算冯·诺依曼熵、迹距离和 \xef\xac\x81delity(加性误差 \xce\xb5 内)的量子算法的时间复杂度为 \xcb\x9c O r 2 /\xce\xb5 2 、 \xcb\x9c O r 5 /\xce\xb5 6 和 \xcb\x9c O r 6 。 5 /\xce\xb5 7 . 5 1 。相比之下,已知的冯·诺依曼熵和迹距离算法需要量子时间复杂度为 \xe2\x84\xa6( N ) [AISW19,GL20,GHS21],而最著名的 \xef\xac\x81delity 算法需要 \xcb\x9c O r 21 . 5 /\xce\xb5 23 . 5 [WZC + 21]。我们的量子算法的关键思想是将块编码从先前工作中的幺正算子扩展到量子态(即密度算子)。它是通过开发几种方便的技术来操纵量子态并从中提取信息来实现的。特别是,我们基于强大的量子奇异值变换(QSVT)[GSLW19],引入了一种用于密度算子及其(非整数)正幂的特征值变换的新技术。我们的技术相对于现有方法的优势在于,不需要对密度算子进行任何限制;与之形成鲜明对比的是,以前的方法通常需要密度算子的最小非零特征值的下限。此外,我们还提供了一些独立感兴趣的技术,用于(次规范化)密度算子的迹估计、线性组合和特征值阈值投影仪,我们相信这些技术在其他量子算法中会很有用。'
b'我们提出了一系列量子算法,用于计算各种量子熵和距离,包括冯·诺依曼熵、量子 R\xc2\xb4enyi 熵、迹距离和 \xef\xac\x81delity。所提出的算法在低秩情况下的表现明显优于最知名的(甚至是量子的)算法,其中一些算法实现了指数级加速。特别是,对于秩为 r 的 N 维量子态,我们提出的用于计算冯·诺依曼熵、迹距离和 \xef\xac\x81delity(加性误差 \xce\xb5 内)的量子算法的时间复杂度为 \xcb\x9c O r 2 /\xce\xb5 2 、 \xcb\x9c O r 5 /\xce\xb5 6 和 \xcb\x9c O r 6 。 5 /\xce\xb5 7 . 5 1 。相比之下,已知的冯·诺依曼熵和迹距离算法需要量子时间复杂度为 \xe2\x84\xa6( N ) [AISW19,GL20,GHS21],而最著名的 \xef\xac\x81delity 算法需要 \xcb\x9c O r 21 . 5 /\xce\xb5 23 . 5 [WZC + 21]。我们的量子算法的关键思想是将块编码从先前工作中的幺正算子扩展到量子态(即密度算子)。它是通过开发几种方便的技术来操纵量子态并从中提取信息来实现的。特别是,我们基于强大的量子奇异值变换(QSVT)[GSLW19],引入了一种用于密度算子及其(非整数)正幂的特征值变换的新技术。我们的技术相对于现有方法的优势在于,不需要对密度算子进行任何限制;与之形成鲜明对比的是,以前的方法通常需要密度算子的最小非零特征值的下限。此外,我们还提供了一些独立感兴趣的技术,用于(次规范化)密度算子的迹估计、线性组合和特征值阈值投影仪,我们相信这些技术在其他量子算法中会很有用。'
讲义
4 量化量子信息和量子无知 72 4.1 冯诺依曼熵。。。。。。。。。。。。。。。。。。。。。。。。。。。72 4.2 量子相对熵。。。。。。。。。。。。。。。。。。。。。。。。。76 4.3 净化,第 1 部分。。。。。。。。。。。。。。。。。。。。。。。。。。。。。78 4.4 舒马赫压缩。。。。。。。。。。。。。。。。。。。。。。。。。。80 4.5 量子通道。。。。。。。。。。。。。。。。。。。。。。。。。。。。。82 4.6 通道二元性 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。89 4.7 净化,第 2 部分。。。。。。。。。。。。。。。。。。。。。。。。。。。。。94 4.8 深度事实 ..................................100 4.9 条件熵的操作意义 ..........。。112
我的神经网络是神经形态的吗?神经形态工程的分类、最新趋势和未来方向
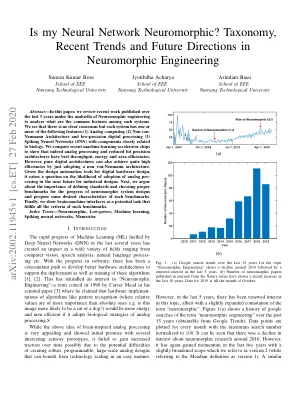
摘要 — 在本文中,我们回顾了过去 3 年在神经形态工程领域发表的最新研究,以分析此类系统的共同特征。我们发现没有明确的共识,但每个系统都具有以下一个或多个特征:(1)模拟计算(2)非冯诺依曼架构和低精度数字处理(3)脉冲神经网络 (SNN),其组件与生物学密切相关。我们比较了最近的机器学习加速器芯片,以表明模拟处理和降低位精度的架构确实具有最佳的吞吐量、能量和面积效率。然而,纯数字架构也可以通过采用非冯诺依曼架构来实现相当高的效率。鉴于数字硬件设计的设计自动化工具,它提出了一个问题,即在不久的将来工业设计中采用模拟处理的可能性。接下来,我们讨论了定义标准和选择适当基准对于神经形态系统设计进展的重要性,并提出了此类基准的一些期望特征。最后,我们展示了脑机接口作为一项潜在任务,它满足了这些基准的所有标准。索引术语——神经形态、低功耗、机器学习、脉冲神经网络、忆阻器
OCR GCSE 计算机科学 (J277) 修订指南
计算机架构 这是计算机硬件的内部逻辑结构和组织。它说明了计算机的各个不同部分如何组合在一起并有效地协同工作 冯·诺依曼架构 冯·诺依曼架构解释了所有设备在处理信息时如何遵循一般规则。所有数据和程序都存储在计算机内存中,并以二进制数字(0 和 1)的形式存储。 输入 — 数据通过输入设备(如键盘、鼠标、麦克风等)输入到设备中 CPU — 数据由 CPU 通过控制单元和 ALU 处理 内存单元 — 数据在 CPU 和计算机内存之间传输 输出 — 最后,经过处理后,数据通过输出设备(如显示器、扬声器、打印机等)输出给用户 输入设备 我们用来将信息发送到计算机的设备,例如鼠标、键盘、麦克风等 输出设备 我们用来将信息从计算机中发送出去的设备,例如显示器、扬声器、打印机等 CPU(中央处理单元) 这是计算机的大脑。它使用提取、解码、执行周期 Hz (赫兹) 来处理用户提供的所有指令。这是我们测量 CPU 速度的标准。1Hz = 每秒可执行 1 条指令。CPU 的常见速度现在以兆赫 (MHz) 或千兆赫 (Ghz) 为单位

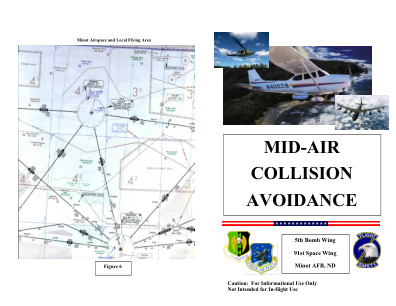
空中防撞 - 迈诺特空军基地
迈诺特空军基地位于 83 号公路旁,这是北达科他州的主要南北公路之一。这条公路也是穿越该州中部的空中交通的飞行路线。空军基地周围有许多小型机场(见图 6,注意:本手册中的图表摘录自分区图和国防部仪表进近图,仅供参考。它们不适用于飞行中。),其中大多数飞行都使用目视飞行规则 (VFR)。为了帮助飞机安全分离,迈诺特进近管制中心在当地飞行区域提供飞行跟踪。图 2、3 和 4 描绘了迈诺特空军基地附近军用飞机通常使用的飞行路径。特别重要的是位于迈诺特 D 级空域内的区域(见比林斯分区图)。在飞越距机场 5.2 海里以内的 2500 英尺高程 (或 4168 英尺平均海平面) 以下的该区域之前,所有飞行员都必须联系迈诺特空军基地控制塔,并在指定空域内飞行时与其保持无线电联系。


