XiaoMi-AI文件搜索系统
World File Search System冲程
脑冲程预测技术学士学位...
后来分析这些特征并将其用于最终预测。最初清洁数据集并准备好使机器学习模型理解。此步骤称为数据预处理。为此,检查数据集的空值并填充它们。然后执行标签编码以将字符串值转换为整数,然后在必要时进行一个热编码。数据预处理后,数据集将其分为火车和测试数据。然后使用这些新数据使用各种分类算法构建模型。的精度是针对所有这些算法计算的,并比较获得预测训练最佳的模型。训练模型并计算准确性后,开发了HTML页面和烧瓶应用程序。Web应用程序是为用户输入预测值。烧瓶应用程序是连接训练的模型和Web应用程序的框架。经过适当的分析后,本文得出结论哪种算法最适合预测中风

提高脑冲程预测准确性
摘要: - 脑卒中预测中的研究至关重要,因为它可能导致早期检测技术和干预措施的发展,从而增强了中风受害者的预后。早期检测和干预可以帮助最大程度地减少中风造成的损害,降低长期并发症的风险,并提高中风生存的人的一般生活质量。此外,中风预测的研究可以帮助识别风险因素并提高对中风根本原因的理解,从而导致更好的预防策略的发展。对脑冲程预测的研究正在进行中,并导致了各种模型和工具的开发,以预测中风的风险和早期检测。但是,这些工具在临床实践中的实施和使用取决于几个因素,例如资源的可用性,特定的医疗保健系统以及在医疗保健提供者和患者中对这些工具的认识和接受程度。通常,风险预测模型可用于快速识别中风高风险的人,并针对预防干预措施,例如生活方式改变,药物管理和筛查。早期检测工具可用于快速识别中风症状并启动适当的治疗方法,这可以改善中风患者的预后。但是,重要的是要注意,这些模型和工具的研发正在进行中,并且它们在临床实践中的使用不断评估和更新。在临床实践中,这些工具可能需要花费一些时间,并看到它们的现实影响。本研究论文的重点是使用一系列机器学习算法(例如逻辑回归(LR),决策树(DT),随机森林(RF),支持向量机(SVM),K-Nearest邻居(KNN),Gaussian Naive Bayes(GNB),Bernoulli Naive Bayers(BnB)(BnB)和A clastif。这项研究的主要重点是比较数据的有效性,因为数据显着不平衡。我们在这项研究中使用了评估指标来评估模型预测的准确性,精度,召回和其他关键绩效指标。接收器操作特征曲线(AUC),少数族类的准确性和多数级别的准确性用于评估方法。
使用机器学习的自动冲程预测
摘要:中风是一种危险的医学障碍,当血液流向大脑的流动被破坏时,会导致神经系统障碍。这是全球范围内的巨大威胁,具有严重的健康和经济影响。为了解决这个问题,研究人员正在开发自动中风预测算法,这将允许早期干预甚至可以挽救生命。随着人口年龄的增长,处于中风风险的人数正在增长,使精确有效的预测系统越来越关键。wo在与六个众所周知的分类器的比较检查中,根据与概括能力和预测准确性有关的指标,探索了所提出的ML技术的有效性。在本研究中,我们还研究了两种可解释的技术,即形状和石灰。Shap(Shapley添加说明)和石灰(局部可解释的模型 - 不合Snostic解释)是建立良好且可靠的方法,用于解释模型决策,尤其是在医疗行业中。实验的发现表明,更复杂的模型优于更简单的模型,顶部模型获得了几乎91%的精度,而其他模型则达到了83-91%的精度。所提出的框架(包括全球和局部可解释的方法)可以帮助标准化复杂的模型并洞悉其决策,从而增强中风护理和治疗。索引术语 - 中风预测,可解释的机器学习,形状,石灰

任务:生命线冲程后急性护理倡议
任务的目的:急性护理后生命线中风倡议是为了改善明尼苏达州的中风患者的基于准则的急性后护理,以改善和延长患者的寿命。这将通过协助设施纳入AHA急性中风计划标准来实现。这些标准涉及患者护理指南,护理协调以及评估和教育的时间。参与的设施将提供有关计划标准的反馈和实施的可行性,与AHA和其他参与设施合作,以提升全州的中风护理,并记录数据以评估该计划的影响。

使用深度学习检测脑冲程检测-IJRPR
这项研究背后的主要驱动力是识别大脑中风。MRI(磁共振成像),CT(计算机断层扫描)。进行中风诊断,使用了各种大脑成像方法。计算机断层扫描(CT)和磁共振成像是最常使用的两种(MRI)。可能性是缺血和出血性中风的同时出现。在没有大脑成像的情况下对缺血性中风进行临床诊断以支持它是一项挑战。进行中风诊断,使用了各种大脑成像方法。计算机断层扫描(CT)和磁共振成像是最常使用的两种(MRI)。由于其更高的可访问性,更便宜的价格和对早期中风的敏感性,因此CT仍然是最重要,最广泛使用的脑成像技术。

严重程度依赖性间歇性白质连接性预测冲程后忽视恢复
研究文章|行为/认知严重程度依赖性间的白色物质连接性预测逃亡后疏忽恢复https://doi.org/10.1523/jneurosci.1311-23.2024收到:2023年7月13日被修订:2023年12月15日接受:2024年3月15日,2024年3月15日copyright copyright©2024 DIV>
使用电力机械和固态切换矩阵用于便携式微波的脑冲程扫描仪
摘要 - 本文研究了开关矩阵对用于脑冲程监测的多视图和低复杂性便携式微波成像系统的影响。它考虑了两种开关解决方案:依靠RF电子开关的临时解决方案和使用固态开关的紧凑型现成的解决方案。进行的分析认为路径衰减和通道间隔离。它研究了扫描时间的不同组件的影响,例如切换,通信,获取时间以及系统动力学对成像性能和监视功能的影响,在识别系统瓶颈的同时优化系统设置。该系统使用升级的天线匹配模块,并使用模仿的出血中风不断发展的场景在实验上进行实验,这证明了两种切换溶液在跟踪和定位中风进展中的有效性。还报道了重复性和对假阳性病例的敏感性的测试。
径向柱塞泵 RKp-ii - Moog, Inc.
轴 (1) 通过十字盘联轴器 (2) 将驱动扭矩无轴向力地传输到星形气缸体 (3)。气缸体由控制轴颈 (4) 静压支撑。气缸体中的径向活塞 (5) 通过静压平衡的滑靴 (6) 抵靠冲程环 (7)。活塞和滑靴通过球窝接头和锁紧环连接。滑靴由两个挡圈 (8) 引导进入冲程环,运行时通过离心力和油压抵靠在冲程环上。当气缸体旋转时,活塞由于冲程环的偏心定位而往复运动,活塞冲程是偏心距的两倍。偏心率由泵壳体内两个相对的控制活塞 (9、10) 改变。进出泵的油流通过泵端口,并通过控制轴颈中的端口进出活塞。这是通过控制轴颈中的进气口和压力缝隙来控制的。补偿器 (11) 监控系统压力和冲程环位置 (输送)。液压力不由滚柱轴承支撑。因此轴承在很大程度上不受负载。
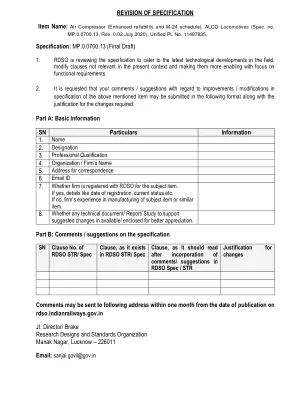
MP.0.0700.13,修订版 0.02 2020 年 7 月),统一 PL 编号 11487835。
5.3 压缩机启动时,在活塞向下移动的冲程中,大气压空气通过单独的进气过滤器吸入,每个 LP 气缸都有一个进气过滤器,通过进气阀进入低压气缸。或者压缩机应配备干式预过滤器提供的预过滤空气供应。吸入空气应该/可能通过发动机过滤系统提供。由于气缸内和大气之间的压力差,空气在向上冲程时被压缩,进气阀关闭,在向上冲程结束时,压缩空气被迫通过排气阀进入中冷器。
使用TOPSIS方法进行多标准决策,用于混合推进系统中的电池类型选择
在常规推进系统中,鲁道夫柴油公司获得专利的两冲程和四冲程柴油发动机(Woodyard,2009)在海上行业中广泛使用。使用基于石油的燃料的两冲程机通常用于海洋船舶(Wankhede,2016年)。油轮的建造是一个重要的问题,因为对石油的需求仍在上升。大多数技术要求,运营效率和建筑期缩短,都符合使用现有船舶数据进行的设计。根据DWT值创建了功率估计曲线,这使设计人员可以简单选择(Pham等,2020)。两冲程机的功率重量比更高。由于这一方面,它成为一种有利可图的选择,尤其是对于贸易和货船(Alturki,2017年)。尽管电力在人类生活中非常重要